 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMono-Camera 3D Multi-Object Tracking Using Deep Learning Detections and PMBM Filtering
Feb 27, 2018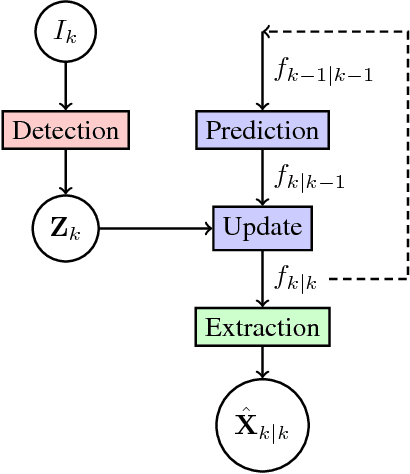
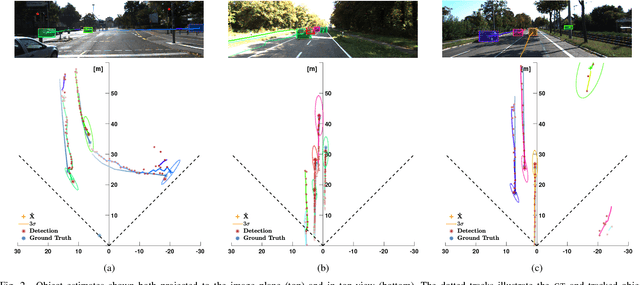

Monocular cameras are one of the most commonly used sensors in the automotive industry for autonomous vehicles. One major drawback using a monocular camera is that it only makes observations in the two dimensional image plane and can not directly measure the distance to objects. In this paper, we aim at filling this gap by developing a multi-object tracking algorithm that takes an image as input and produces trajectories of detected objects in a world coordinate system. We solve this by using a deep neural network trained to detect and estimate the distance to objects from a single input image. The detections from a sequence of images are fed in to a state-of-the art Poisson multi-Bernoulli mixture tracking filter. The combination of the learned detector and the PMBM filter results in an algorithm that achieves 3D tracking using only mono-camera images as input. The performance of the algorithm is evaluated both in 3D world coordinates, and 2D image coordinates, using the publicly available KITTI object tracking dataset. The algorithm shows the ability to accurately track objects, correctly handle data associations, even when there is a big overlap of the objects in the image, and is one of the top performing algorithms on the KITTI object tracking benchmark. Furthermore, the algorithm is efficient, running on average close to 20 frames per second.
Poisson multi-Bernoulli conjugate prior for multiple extended object estimation
Apr 24, 2017
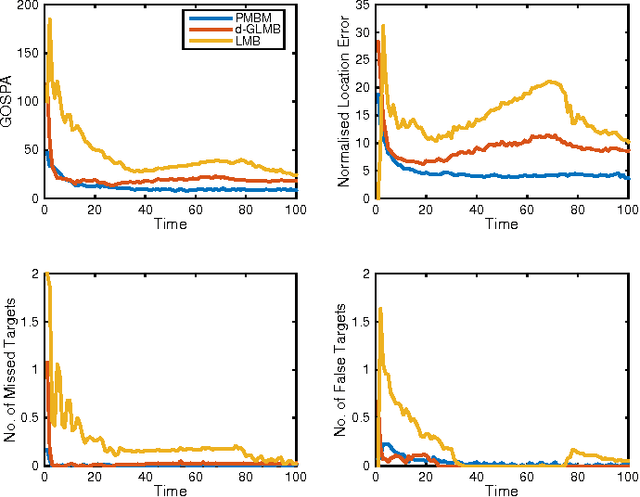


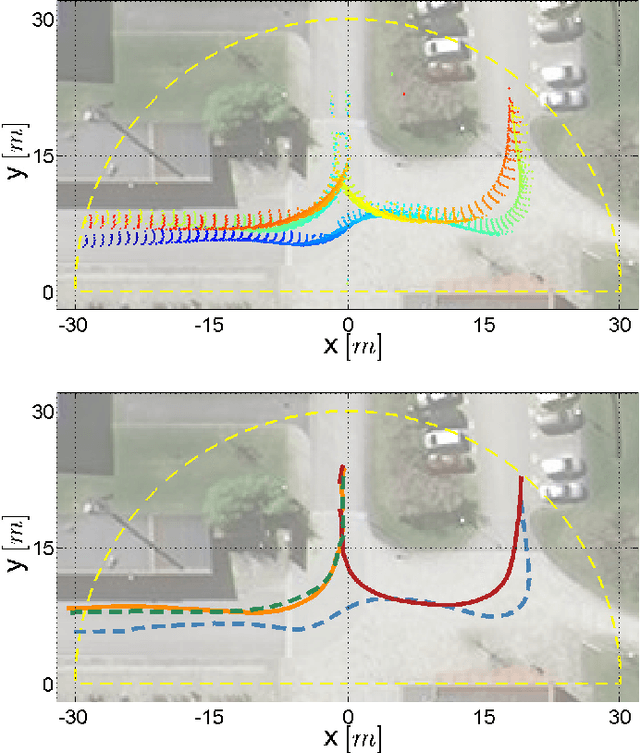
This paper presents a Poisson multi-Bernoulli mixture (PMBM) conjugate prior for multiple extended object filtering. A Poisson point process is used to describe the existence of yet undetected targets, while a multi-Bernoulli mixture describes the distribution of the targets that have been detected. The prediction and update equations are presented for the standard transition density and measurement likelihood. Both the prediction and the update preserve the PMBM form of the density, and in this sense the PMBM density is a conjugate prior. However, the unknown data associations lead to an intractably large number of terms in the PMBM density, and approximations are necessary for tractability. A gamma Gaussian inverse Wishart implementation is presented, along with methods to handle the data association problem. A simulation study shows that the extended target PMBM filter outperforms the extended target $\delta$-GLMB and LMB filters. An experiment with Lidar data illustrates the benefit of tracking both detected and undetected targets.
Extended Object Tracking: Introduction, Overview and Applications
Feb 21, 2017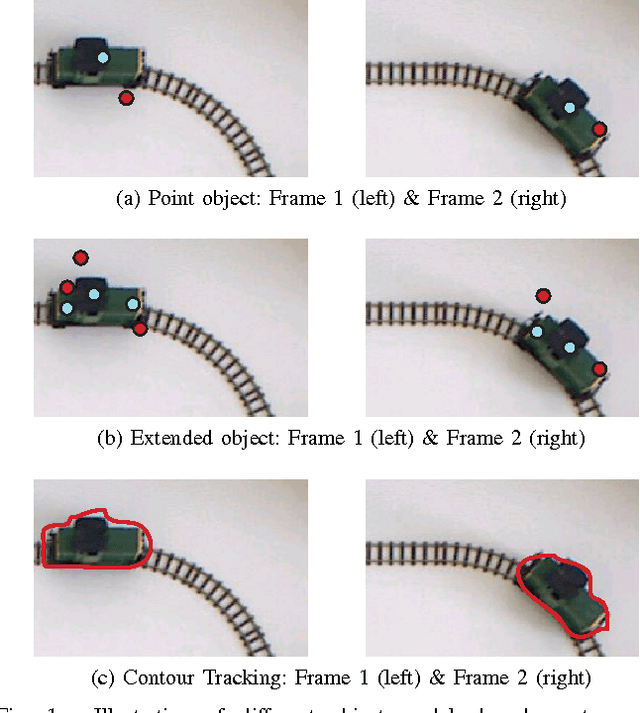
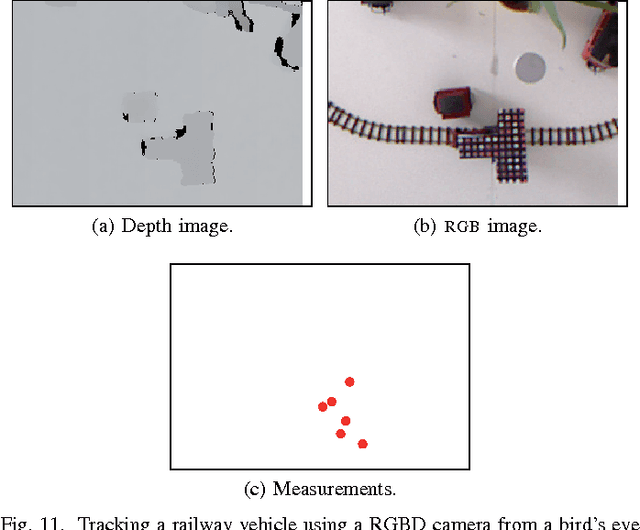
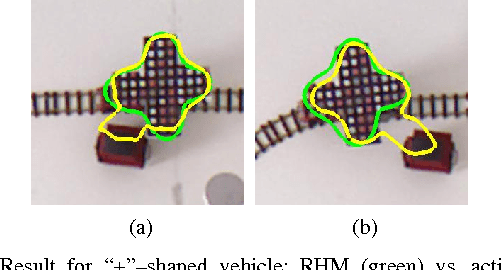
This article provides an elaborate overview of current research in extended object tracking. We provide a clear definition of the extended object tracking problem and discuss its delimitation to other types of object tracking. Next, different aspects of extended object modelling are extensively discussed. Subsequently, we give a tutorial introduction to two basic and well used extended object tracking approaches - the random matrix approach and the Kalman filter-based approach for star-convex shapes. The next part treats the tracking of multiple extended objects and elaborates how the large number of feasible association hypotheses can be tackled using both Random Finite Set (RFS) and Non-RFS multi-object trackers. The article concludes with a summary of current applications, where four example applications involving camera, X-band radar, light detection and ranging (lidar), red-green-blue-depth (RGB-D) sensors are highlighted.
* 30 pages, 19 figures