 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExtended Object Tracking: Introduction, Overview and Applications
Feb 21, 2017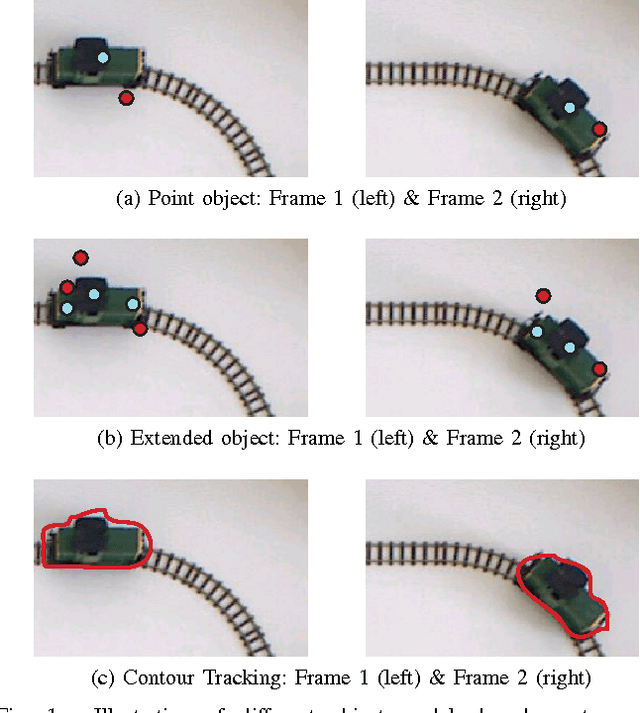
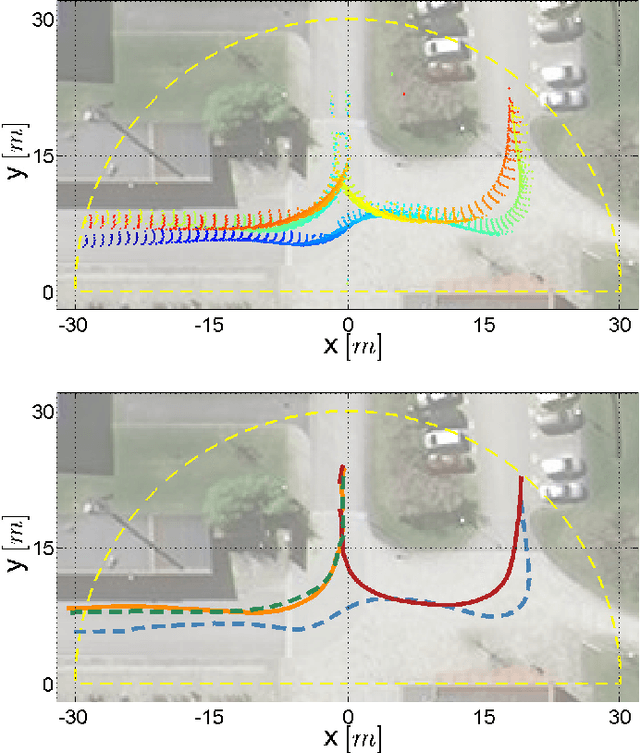
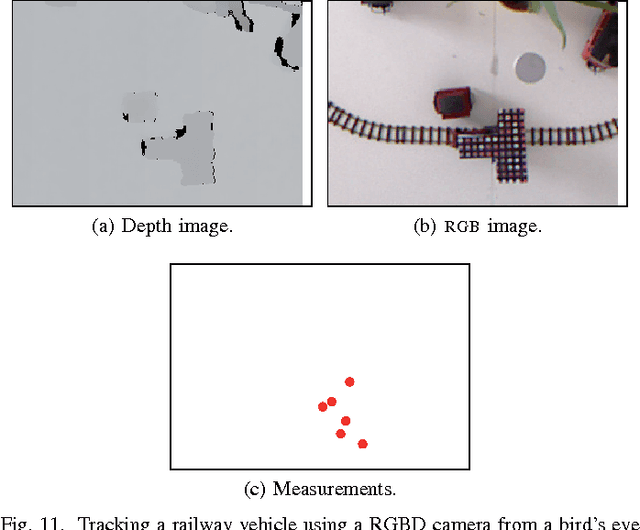
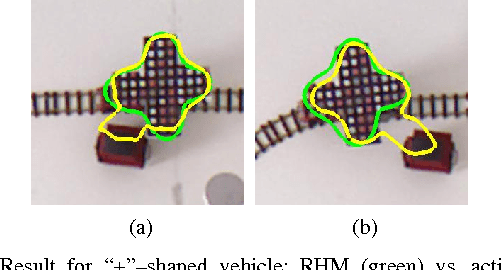
This article provides an elaborate overview of current research in extended object tracking. We provide a clear definition of the extended object tracking problem and discuss its delimitation to other types of object tracking. Next, different aspects of extended object modelling are extensively discussed. Subsequently, we give a tutorial introduction to two basic and well used extended object tracking approaches - the random matrix approach and the Kalman filter-based approach for star-convex shapes. The next part treats the tracking of multiple extended objects and elaborates how the large number of feasible association hypotheses can be tackled using both Random Finite Set (RFS) and Non-RFS multi-object trackers. The article concludes with a summary of current applications, where four example applications involving camera, X-band radar, light detection and ranging (lidar), red-green-blue-depth (RGB-D) sensors are highlighted.
* 30 pages, 19 figures
A Random Finite Set Approach for Dynamic Occupancy Grid Maps with Real-Time Application
Sep 10, 2016
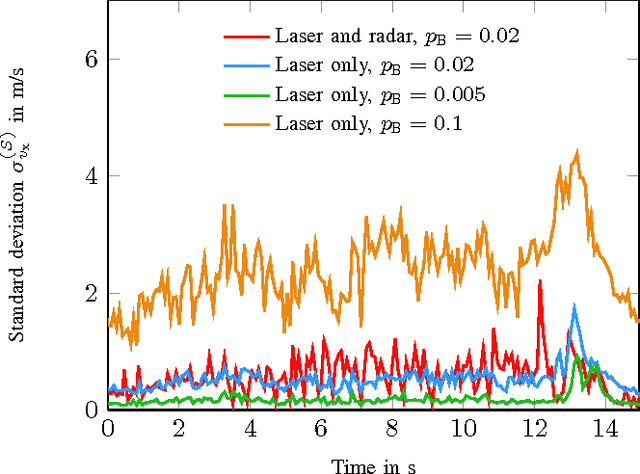
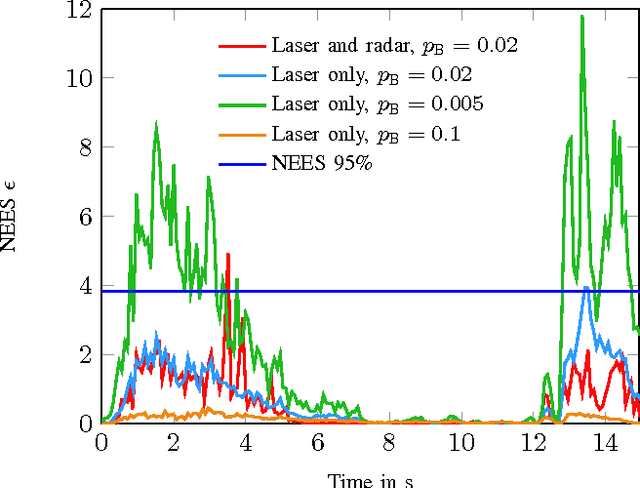

Grid mapping is a well established approach for environment perception in robotic and automotive applications. Early work suggests estimating the occupancy state of each grid cell in a robot's environment using a Bayesian filter to recursively combine new measurements with the current posterior state estimate of each grid cell. This filter is often referred to as binary Bayes filter (BBF). A basic assumption of classical occupancy grid maps is a stationary environment. Recent publications describe bottom-up approaches using particles to represent the dynamic state of a grid cell and outline prediction-update recursions in a heuristic manner. This paper defines the state of multiple grid cells as a random finite set, which allows to model the environment as a stochastic, dynamic system with multiple obstacles, observed by a stochastic measurement system. It motivates an original filter called the probability hypothesis density / multi-instance Bernoulli (PHD/MIB) filter in a top-down manner. The paper presents a real-time application serving as a fusion layer for laser and radar sensor data and describes in detail a highly efficient parallel particle filter implementation. A quantitative evaluation shows that parameters of the stochastic process model affect the filter results as theoretically expected and that appropriate process and observation models provide consistent state estimation results.