 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvaluating Roadside Perception for Autonomous Vehicles: Insights from Field Testing
Jan 22, 2024Roadside perception systems are increasingly crucial in enhancing traffic safety and facilitating cooperative driving for autonomous vehicles. Despite rapid technological advancements, a major challenge persists for this newly arising field: the absence of standardized evaluation methods and benchmarks for these systems. This limitation hampers the ability to effectively assess and compare the performance of different systems, thus constraining progress in this vital field. This paper introduces a comprehensive evaluation methodology specifically designed to assess the performance of roadside perception systems. Our methodology encompasses measurement techniques, metric selection, and experimental trial design, all grounded in real-world field testing to ensure the practical applicability of our approach. We applied our methodology in Mcity\footnote{\url{https://mcity.umich.edu/}}, a controlled testing environment, to evaluate various off-the-shelf perception systems. This approach allowed for an in-depth comparative analysis of their performance in realistic scenarios, offering key insights into their respective strengths and limitations. The findings of this study are poised to inform the development of industry-standard benchmarks and evaluation methods, thereby enhancing the effectiveness of roadside perception system development and deployment for autonomous vehicles. We anticipate that this paper will stimulate essential discourse on standardizing evaluation methods for roadside perception systems, thus pushing the frontiers of this technology. Furthermore, our results offer both academia and industry a comprehensive understanding of the capabilities of contemporary infrastructure-based perception systems.
A Random Finite Set Approach for Dynamic Occupancy Grid Maps with Real-Time Application
Sep 10, 2016
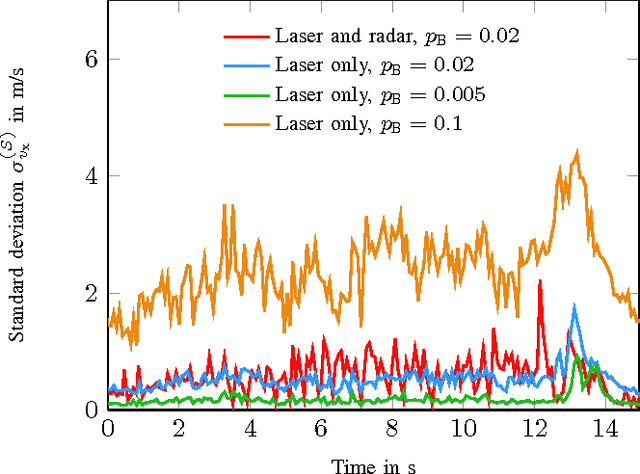
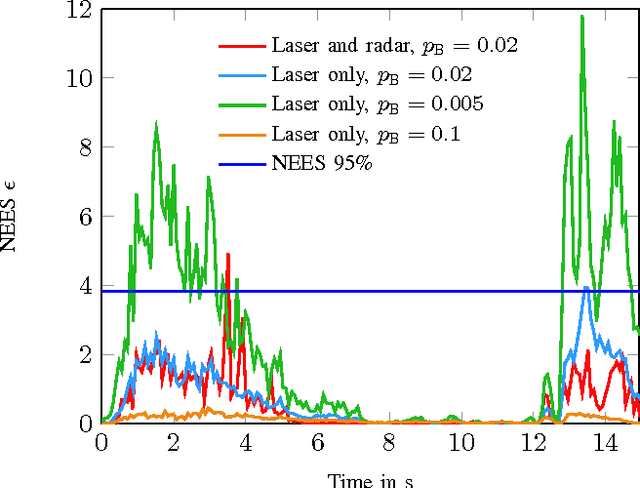

Grid mapping is a well established approach for environment perception in robotic and automotive applications. Early work suggests estimating the occupancy state of each grid cell in a robot's environment using a Bayesian filter to recursively combine new measurements with the current posterior state estimate of each grid cell. This filter is often referred to as binary Bayes filter (BBF). A basic assumption of classical occupancy grid maps is a stationary environment. Recent publications describe bottom-up approaches using particles to represent the dynamic state of a grid cell and outline prediction-update recursions in a heuristic manner. This paper defines the state of multiple grid cells as a random finite set, which allows to model the environment as a stochastic, dynamic system with multiple obstacles, observed by a stochastic measurement system. It motivates an original filter called the probability hypothesis density / multi-instance Bernoulli (PHD/MIB) filter in a top-down manner. The paper presents a real-time application serving as a fusion layer for laser and radar sensor data and describes in detail a highly efficient parallel particle filter implementation. A quantitative evaluation shows that parameters of the stochastic process model affect the filter results as theoretically expected and that appropriate process and observation models provide consistent state estimation results.