 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHierarchical Road Topology Learning for Urban Map-less Driving
Mar 31, 2021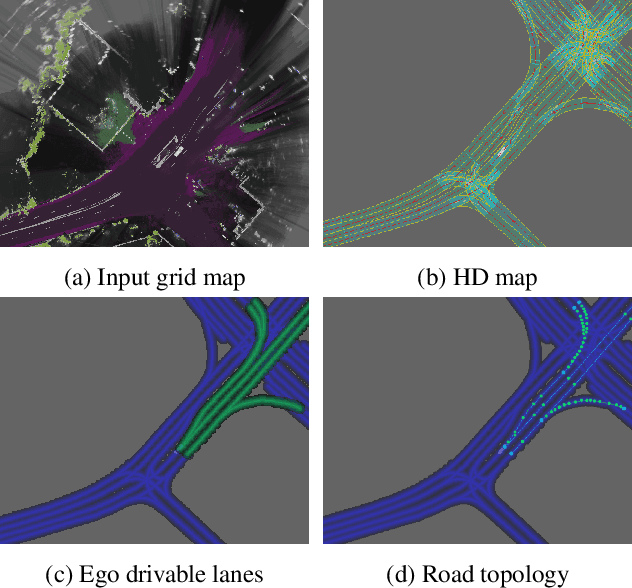

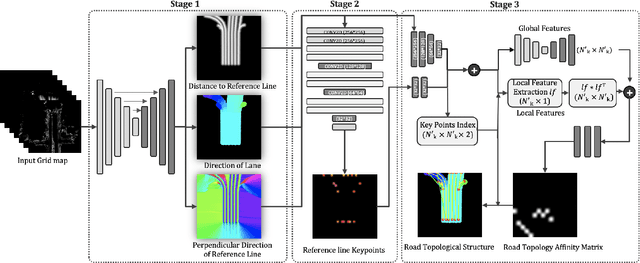

The majority of current approaches in autonomous driving rely on High-Definition (HD) maps which detail the road geometry and surrounding area. Yet, this reliance is one of the obstacles to mass deployment of autonomous vehicles due to poor scalability of such prior maps. In this paper, we tackle the problem of online road map extraction via leveraging the sensory system aboard the vehicle itself. To this end, we design a structured model where a graph representation of the road network is generated in a hierarchical fashion within a fully convolutional network. The method is able to handle complex road topology and does not require a user in the loop.
Holistic Grid Fusion Based Stop Line Estimation
Sep 18, 2020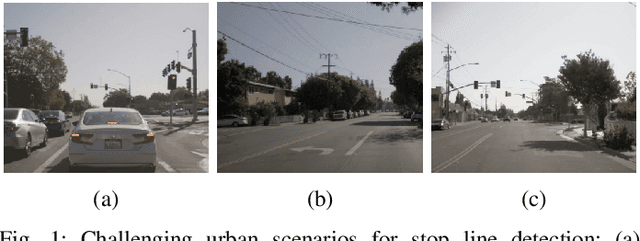
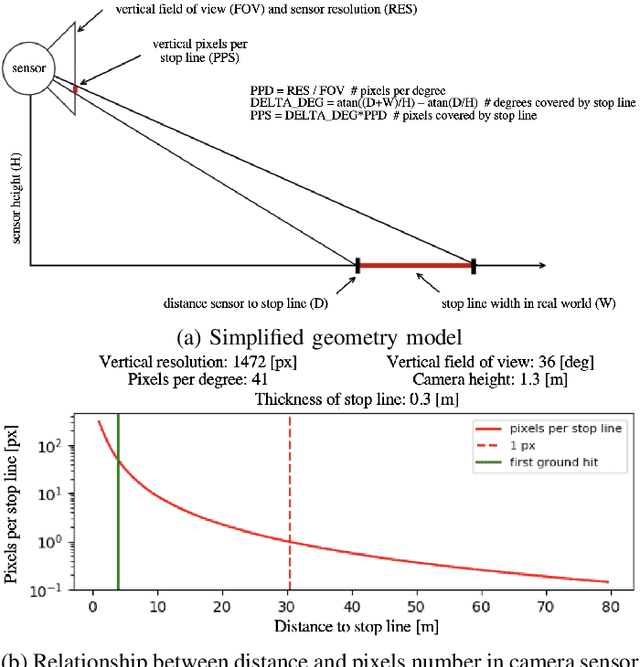
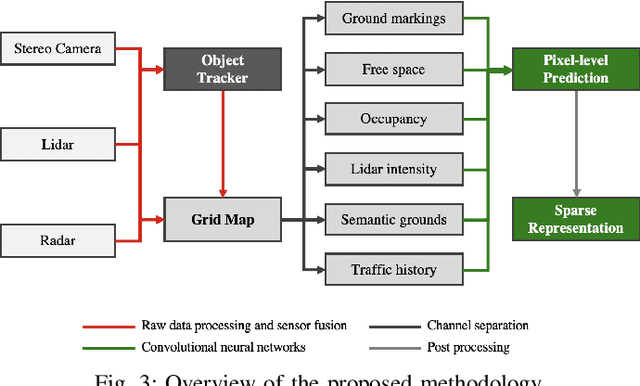
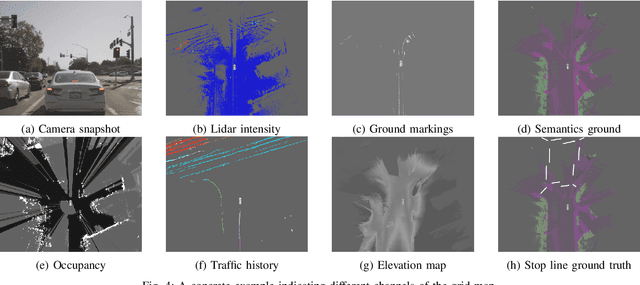
Intersection scenarios provide the most complex traffic situations in Autonomous Driving and Driving Assistance Systems. Knowing where to stop in advance in an intersection is an essential parameter in controlling the longitudinal velocity of the vehicle. Most of the existing methods in literature solely use cameras to detect stop lines, which is typically not sufficient in terms of detection range. To address this issue, we propose a method that takes advantage of fused multi-sensory data including stereo camera and lidar as input and utilizes a carefully designed convolutional neural network architecture to detect stop lines. Our experiments show that the proposed approach can improve detection range compared to camera data alone, works under heavy occlusion without observing the ground markings explicitly, is able to predict stop lines for all lanes and allows detection at a distance up to 50 meters.
A Random Finite Set Approach for Dynamic Occupancy Grid Maps with Real-Time Application
Sep 10, 2016
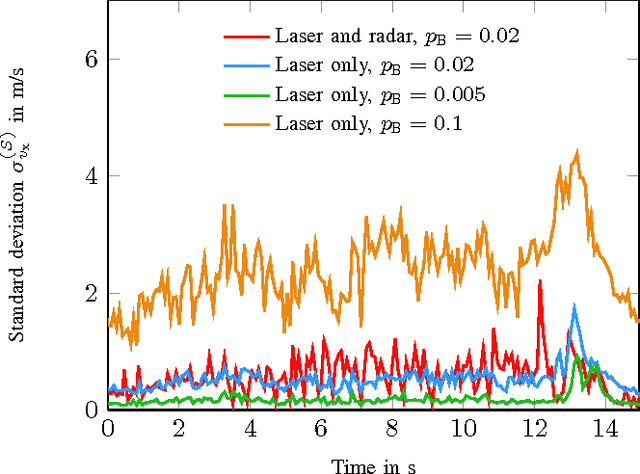
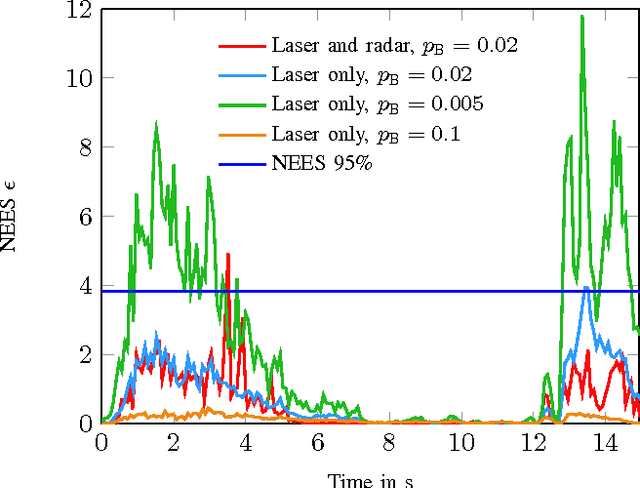

Grid mapping is a well established approach for environment perception in robotic and automotive applications. Early work suggests estimating the occupancy state of each grid cell in a robot's environment using a Bayesian filter to recursively combine new measurements with the current posterior state estimate of each grid cell. This filter is often referred to as binary Bayes filter (BBF). A basic assumption of classical occupancy grid maps is a stationary environment. Recent publications describe bottom-up approaches using particles to represent the dynamic state of a grid cell and outline prediction-update recursions in a heuristic manner. This paper defines the state of multiple grid cells as a random finite set, which allows to model the environment as a stochastic, dynamic system with multiple obstacles, observed by a stochastic measurement system. It motivates an original filter called the probability hypothesis density / multi-instance Bernoulli (PHD/MIB) filter in a top-down manner. The paper presents a real-time application serving as a fusion layer for laser and radar sensor data and describes in detail a highly efficient parallel particle filter implementation. A quantitative evaluation shows that parameters of the stochastic process model affect the filter results as theoretically expected and that appropriate process and observation models provide consistent state estimation results.