 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvaluating Roadside Perception for Autonomous Vehicles: Insights from Field Testing
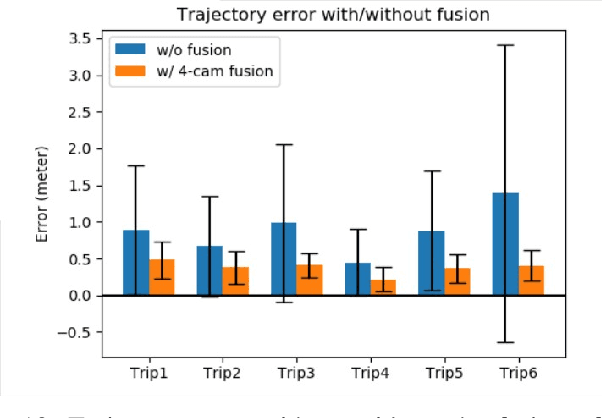
Jan 22, 2024Roadside perception systems are increasingly crucial in enhancing traffic safety and facilitating cooperative driving for autonomous vehicles. Despite rapid technological advancements, a major challenge persists for this newly arising field: the absence of standardized evaluation methods and benchmarks for these systems. This limitation hampers the ability to effectively assess and compare the performance of different systems, thus constraining progress in this vital field. This paper introduces a comprehensive evaluation methodology specifically designed to assess the performance of roadside perception systems. Our methodology encompasses measurement techniques, metric selection, and experimental trial design, all grounded in real-world field testing to ensure the practical applicability of our approach. We applied our methodology in Mcity\footnote{\url{https://mcity.umich.edu/}}, a controlled testing environment, to evaluate various off-the-shelf perception systems. This approach allowed for an in-depth comparative analysis of their performance in realistic scenarios, offering key insights into their respective strengths and limitations. The findings of this study are poised to inform the development of industry-standard benchmarks and evaluation methods, thereby enhancing the effectiveness of roadside perception system development and deployment for autonomous vehicles. We anticipate that this paper will stimulate essential discourse on standardizing evaluation methods for roadside perception systems, thus pushing the frontiers of this technology. Furthermore, our results offer both academia and industry a comprehensive understanding of the capabilities of contemporary infrastructure-based perception systems.
MSight: An Edge-Cloud Infrastructure-based Perception System for Connected Automated Vehicles
Oct 08, 2023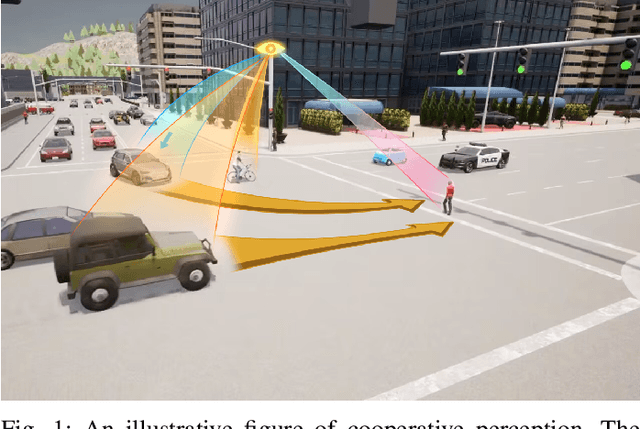
As vehicular communication and networking technologies continue to advance, infrastructure-based roadside perception emerges as a pivotal tool for connected automated vehicle (CAV) applications. Due to their elevated positioning, roadside sensors, including cameras and lidars, often enjoy unobstructed views with diminished object occlusion. This provides them a distinct advantage over onboard perception, enabling more robust and accurate detection of road objects. This paper presents MSight, a cutting-edge roadside perception system specifically designed for CAVs. MSight offers real-time vehicle detection, localization, tracking, and short-term trajectory prediction. Evaluations underscore the system's capability to uphold lane-level accuracy with minimal latency, revealing a range of potential applications to enhance CAV safety and efficiency. Presently, MSight operates 24/7 at a two-lane roundabout in the City of Ann Arbor, Michigan.
Robust Roadside Perception for Autonomous Driving: an Annotation-free Strategy with Synthesized Data
Jun 29, 2023Recently, with the rapid development in vehicle-to-infrastructure communication technologies, the infrastructure-based, roadside perception system for cooperative driving has become a rising field. This paper focuses on one of the most critical challenges - the data-insufficiency problem. The lacking of high-quality labeled roadside sensor data with high diversity leads to low robustness, and low transfer-ability of current roadside perception systems. In this paper, a novel approach is proposed to address this problem by creating synthesized training data using Augmented Reality and Generative Adversarial Network. This method creates synthesized dataset that is capable of training or fine-tuning a roadside perception detector which is robust to different weather and lighting conditions, or to adapt a new deployment location. We validate our approach at two intersections: Mcity intersection and State St/Ellsworth Rd roundabout. Our experiments show that (1) the detector can achieve good performance in all conditions when trained on synthesized data only, and (2) the performance of an existing detector trained with labeled data can be enhanced by synthesized data in harsh conditions.
ROCO: A Roundabout Traffic Conflict Dataset
Mar 02, 2023Traffic conflicts have been studied by the transportation research community as a surrogate safety measure for decades. However, due to the rarity of traffic conflicts, collecting large-scale real-world traffic conflict data becomes extremely challenging. In this paper, we introduce and analyze ROCO - a real-world roundabout traffic conflict dataset. The data is collected at a two-lane roundabout at the intersection of State St. and W. Ellsworth Rd. in Ann Arbor, Michigan. We use raw video dataflow captured from four fisheye cameras installed at the roundabout as our input data source. We adopt a learning-based conflict identification algorithm from video to find potential traffic conflicts, and then manually label them for dataset collection and annotation. In total 557 traffic conflicts and 17 traffic crashes are collected from August 2021 to October 2021. We provide trajectory data of the traffic conflict scenes extracted using our roadside perception system. Taxonomy based on traffic conflict severity, reason for the traffic conflict, and its effect on the traffic flow is provided. With the traffic conflict data collected, we discover that failure to yield to circulating vehicles when entering the roundabout is the largest contributing reason for traffic conflicts. ROCO dataset will be made public in the short future.
Real-time Full-stack Traffic Scene Perception for Autonomous Driving with Roadside Cameras
Jun 20, 2022
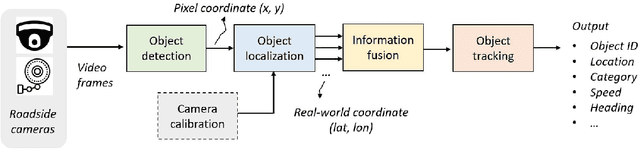
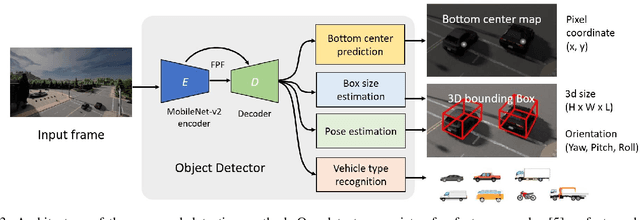
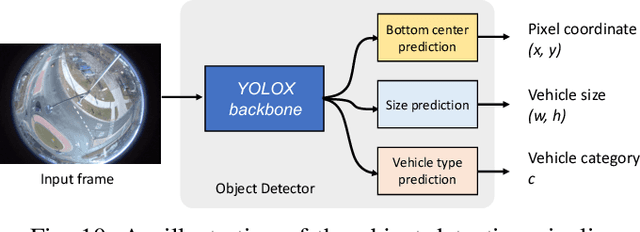
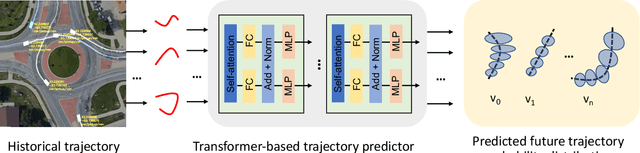
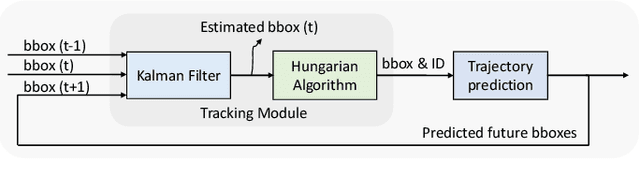
We propose a novel and pragmatic framework for traffic scene perception with roadside cameras. The proposed framework covers a full-stack of roadside perception pipeline for infrastructure-assisted autonomous driving, including object detection, object localization, object tracking, and multi-camera information fusion. Unlike previous vision-based perception frameworks rely upon depth offset or 3D annotation at training, we adopt a modular decoupling design and introduce a landmark-based 3D localization method, where the detection and localization can be well decoupled so that the model can be easily trained based on only 2D annotations. The proposed framework applies to either optical or thermal cameras with pinhole or fish-eye lenses. Our framework is deployed at a two-lane roundabout located at Ellsworth Rd. and State St., Ann Arbor, MI, USA, providing 7x24 real-time traffic flow monitoring and high-precision vehicle trajectory extraction. The whole system runs efficiently on a low-power edge computing device with all-component end-to-end delay of less than 20ms.
A hierarchical behavior prediction framework at signalized intersections
Oct 29, 2021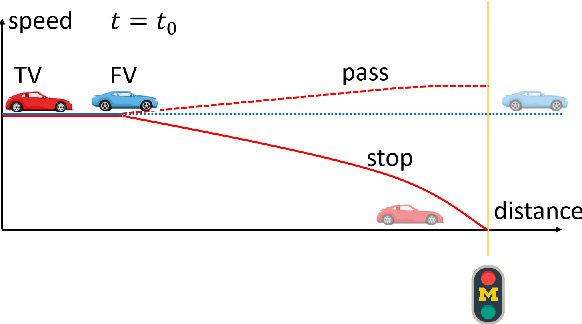



Road user behavior prediction is one of the most critical components in trajectory planning for autonomous driving, especially in urban scenarios involving traffic signals. In this paper, a hierarchical framework is proposed to predict vehicle behaviors at a signalized intersection, using the traffic signal information of the intersection. The framework is composed of two phases: a discrete intention prediction phase and a continuous trajectory prediction phase. In the discrete intention prediction phase, a Bayesian network is adopted to predict the vehicle's high-level intention, after that, maximum entropy inverse reinforcement learning is utilized to learn the human driving model offline; during the online trajectory prediction phase, a driver characteristic is designed and updated to capture the different driving preferences between human drivers. We applied the proposed framework to one of the most challenging scenarios in autonomous driving: the yellow light running scenario. Numerical experiment results are presented in the later part of the paper which show the viability of the method. The accuracy of the Bayesian network for discrete intention prediction is 91.1%, and the prediction results are getting more and more accurate as the yellow time elapses. The average Euclidean distance error in continuous trajectory prediction is only 0.85 m in the yellow light running scenario.
Using AI for Mitigating the Impact of Network Delay in Cloud-based Intelligent Traffic Signal Control
Mar 06, 2020


The recent advancements in cloud services, Internet of Things (IoT) and Cellular networks have made cloud computing an attractive option for intelligent traffic signal control (ITSC). Such a method significantly reduces the cost of cables, installation, number of devices used, and maintenance. ITSC systems based on cloud computing lower the cost of the ITSC systems and make it possible to scale the system by utilizing the existing powerful cloud platforms. While such systems have significant potential, one of the critical problems that should be addressed is the network delay. It is well known that network delay in message propagation is hard to prevent, which could potentially degrade the performance of the system or even create safety issues for vehicles at intersections. In this paper, we introduce a new traffic signal control algorithm based on reinforcement learning, which performs well even under severe network delay. The framework introduced in this paper can be helpful for all agent-based systems using remote computing resources where network delay could be a critical concern. Extensive simulation results obtained for different scenarios show the viability of the designed algorithm to cope with network delay.
Partially Detected Intelligent Traffic Signal Control: Environmental Adaptation
Oct 23, 2019


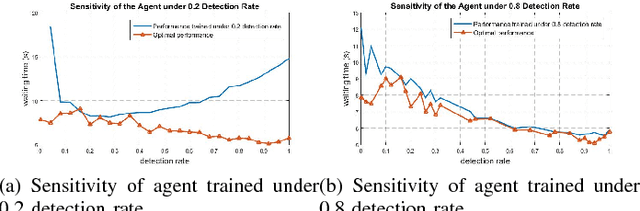
Partially Detected Intelligent Traffic Signal Control (PD-ITSC) systems that can optimize traffic signals based on limited detected information could be a cost-efficient solution for mitigating traffic congestion in the future. In this paper, we focus on a particular problem in PD-ITSC - adaptation to changing environments. To this end, we investigate different reinforcement learning algorithms, including Q-learning, Proximal Policy Optimization (PPO), Advantage Actor-Critic (A2C), and Actor-Critic with Kronecker-Factored Trust Region (ACKTR). Our findings suggest that RL algorithms can find optimal strategies under partial vehicle detection; however, policy-based algorithms can adapt to changing environments more efficiently than value-based algorithms. We use these findings to draw conclusions about the value of different models for PD-ITSC systems.
Partially Observable Reinforcement Learning for Intelligent Transportation Systems
Jul 04, 2018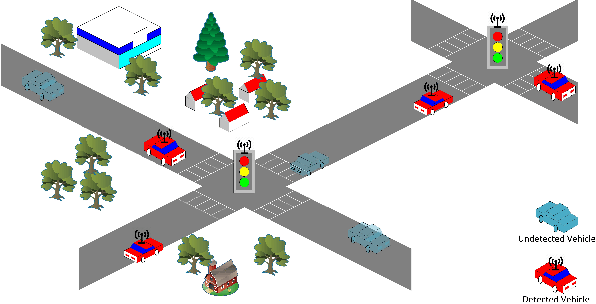


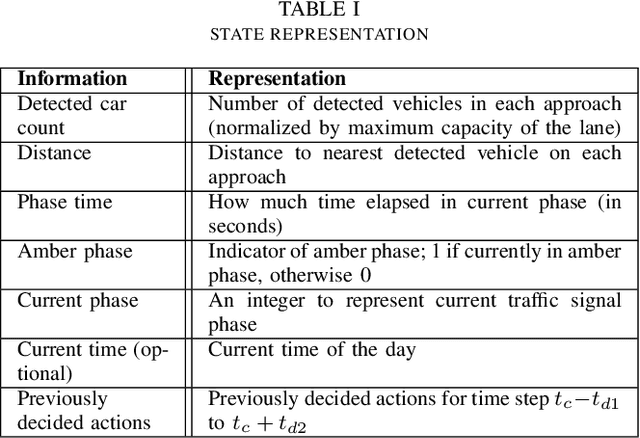
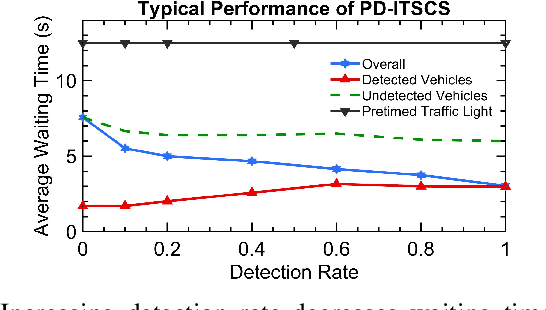
Intelligent Transportation Systems (ITS) have attracted the attention of researchers and the general public alike as a means to alleviate traffic congestion. Recently, the maturity of wireless technology has enabled a cost-efficient way to achieve ITS by detecting vehicles using Vehicle to Infrastructure (V2I) communications. Traditional ITS algorithms, in most cases, assume that every vehicle is observed, such as by a camera or a loop detector, but a V2I implementation would detect only those vehicles with wireless communications capability. We examine a family of transportation systems, which we will refer to as `Partially Detected Intelligent Transportation Systems'. An algorithm that can act well under a small detection rate is highly desirable due to gradual penetration rates of the underlying wireless technologies such as Dedicated Short Range Communications (DSRC) technology. Artificial Intelligence (AI) techniques for Reinforcement Learning (RL) are suitable tools for finding such an algorithm due to utilizing varied inputs and not requiring explicit analytic understanding or modeling of the underlying system dynamics. In this paper, we report a RL algorithm for partially observable ITS based on DSRC. The performance of this system is studied under different car flows, detection rates, and topologies of the road network. Our system is able to efficiently reduce the average waiting time of vehicles at an intersection, even with a low detection rate.