 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMSight: An Edge-Cloud Infrastructure-based Perception System for Connected Automated Vehicles
Paper and Code
Oct 08, 2023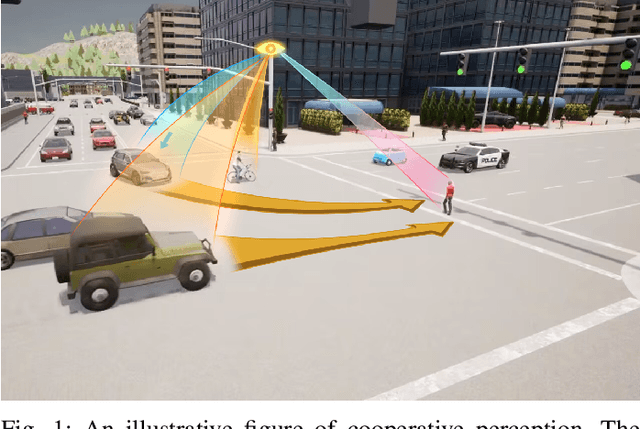
As vehicular communication and networking technologies continue to advance, infrastructure-based roadside perception emerges as a pivotal tool for connected automated vehicle (CAV) applications. Due to their elevated positioning, roadside sensors, including cameras and lidars, often enjoy unobstructed views with diminished object occlusion. This provides them a distinct advantage over onboard perception, enabling more robust and accurate detection of road objects. This paper presents MSight, a cutting-edge roadside perception system specifically designed for CAVs. MSight offers real-time vehicle detection, localization, tracking, and short-term trajectory prediction. Evaluations underscore the system's capability to uphold lane-level accuracy with minimal latency, revealing a range of potential applications to enhance CAV safety and efficiency. Presently, MSight operates 24/7 at a two-lane roundabout in the City of Ann Arbor, Michigan.