 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Remote Sensing Instance Segmentation with Linear-Time State Space Distilled Visual Foundation Models
Jun 24, 2026The computational complexity of Transformers scales quadratically with the number of tokens, which significantly constrains the efficiency of vision models, particularly recent ViT-based foundation models in dense prediction tasks. Instance segmentation, a typical dense visual prediction task in the remote sensing field, faces similar challenges. In this paper, inspired by the recent advances of knowledge distillation in large language models, we introduce RS4D - a new remote sensing instance segmentation method with linear computational complexity, which addresses the inefficiency of long sequence modeling through distilled state space modeling (SSM). We propose an adaptive noise and masking knowledge distillation training method for pre-training lightweight SSM backbones, which effectively compresses knowledge from the vast self-attention space into a compact, dense linear state space. We also design a remote sensing image instance segmentation architecture based on this lightweight visual encoder, where we explore variants of three different backbones and two segmentation heads. Extensive experiments are conducted on multiple benchmark datasets, including SSDD, WHU, and NWPU. Compared to ViT-based approaches, our proposed SSM backbone achieves an 8x reduction in parameters and a 9x reduction in FLOPs while maintaining comparable or superior accuracy to both ViT- and CNN-based instance segmentation methods. The implementation codes have been publicly available at https://github.com/QinzheYang/RS4D.
* 17 pages, 11 figures, has been published in IEEE TGRS vol. 64, pp. 5625417-5625417, 2026, Art no. 5625417, doi: 10.1109/TGRS.2026.3696104
LEVIRDet: A Million-Scale 159-Category Dataset and Foundation Model for Universal Remote Sensing Object Detection
Jun 24, 2026Remote sensing object detection has advanced rapidly with the development of large-scale benchmarks and modern detection architectures. However, existing datasets and detectors remain fragmented. Most benchmarks focus on limited categories, fixed spatial resolutions, or a single sensor, while detectors still struggle to work across different sensors and categorical systems. In this paper, we introduce LEVIRDet-159, the largest and most comprehensive remote sensing object detection dataset to date, with 159 categories, 2.56 million bounding boxes, and 700k fine-grained annotations under a multi-level taxonomy. In each key scale dimension, LEVIRDet-159 exceeds the corresponding largest existing remote sensing object detection dataset, containing approximately (7x) more images, (6x) more object instances, and (4x) more categories. Based on this dataset, we design LEVIRDetNet, a scale-hierarchy-aware detection foundation model for universal remote sensing object detection. LEVIRDetNet couples online visual Ground Sampling Distance (GSD) prediction, GSD-conditioned query modulation and allocation, and a hierarchy-aware detection head for mixed-granularity remote sensing supervision. Under stringent evaluation settings, LEVIRDetNet demonstrates strong cross-domain generalization. Even without target-domain training or fine-tuning, it achieves state-of-the-art detection performance on 9 external benchmarks, improving the strongest fully supervised competing methods by 5.02 mAP on average under each benchmark's primary metric. We hope this study will facilitate the development of strongly generalizable remote sensing object detection across diverse category systems, spatial resolutions, and sensor platforms. The dataset and trained models will be released at https://qinzheyang.github.io/LEVIRDet/, accompanying the final paper.
State Space Models Meet Remote Sensing: A Survey
Jun 24, 2026State Space Models (SSMs), designed for long-range modeling, offer linear computational complexity and strong capabilities in capturing long-range dependencies. In the field of remote sensing, SSMs have gained popularity due to their effectiveness in addressing unique challenges such as dense visual predictions, multi-modal remote sensing data, and temporal remote sensing data, which have also yielded significant advancements in customized architectures. This paper presents a comprehensive review of SSM-based approaches in remote sensing, covering most of the relevant studies since SSMs were first introduced to the field. We offer a multi-dimensional analysis examining SSM applications in remote sensing tasks and discussing advancements in architecture design. This paper not only synthesizes the rapid progress in SSM-based research but also identifies key challenges and future opportunities. By providing a detailed perspective, this paper aims to serve as a foundational resource for remote sensing researchers, offering actionable insights to foster further advancements in this evolving domain. We will keep tracing related works at https://github.com/QinzheYang/Awesome-RS-State-Space-Model.
SFR-Net: Learning Scale-Frustum Representations for Ultra-Wide Area Remote Sensing Image Segmentation
May 25, 2026Pixel count and geographical coverage are two key characteristics of remote sensing images. Existing remote sensing image segmentation methods typically focus on images with either a small pixel count or a large pixel count but limited geographical coverage. In this paper, we introduce a novel segmentation task targeting ultra-wide area (UWA) remote sensing images, characterized by both a large pixel count and extremely wide geographical coverage. The core challenges of UWA segmentation lie in simultaneously handling ground objects with significantly varying scales and maintaining long-range contextual semantic continuity. To address these challenges, we propose the Scale-Frustum Representation Network (SFR-Net). Inspired by the viewing frustums of remote sensing images captured from different altitudes, we construct scale-frustum representations, enabling unified modeling of ground objects and contextual features at different scales. Furthermore, we design a cascaded cross-scale fusion mechanism to effectively integrate these representations, enhancing local semantic understanding while ensuring long-range contextual continuity. Experimental results on GID and FBPS demonstrate that SFR-Net achieves state-of-the-art performance, improving mIoU by 1.72% and 4.29%, respectively, over the strongest competing methods. In addition, the proposed scale-frustum representations can be integrated into generic segmentation networks to improve both segmentation accuracy and convergence speed. The implementation code will be publicly available at https://github.com/ChuyuZhong/SFR-Net.
MetaEarth-MM: Unified Multimodal Remote Sensing Image Generation with Scene-centered Joint Modeling
May 19, 2026Multi-modal remote sensing images are vital for Earth observation, yet complete paired observations are often scarce in practice. Existing generative methods commonly address this problem through isolated pairwise modality translation, but their versatility and scalability remain limited as the number of modalities and generation tasks increases. Here, we develop a generative foundation model MetaEarth-MM for multi-modal remote sensing imagery, enabling paired joint generation and any-to-any translation across five modalities within a unified model. Recognizing the intrinsic scene consistency underlying multi-modal observations, we introduce a scene-centered joint modeling paradigm in MetaEarth-MM. Unlike previous methods that rely on direct appearance-level cross-modal mapping, our model organizes the generation around the underlying scene content. Specifically, MetaEarth-MM adopts a decoupled architecture that first infers a latent scene representation from available observations, and then generates target modalities conditioned on this intermediate state. To support training, we further construct EarthMM, a large-scale dataset comprising 2.8 million multi-resolution global images with 2.2 million aligned pairs. Extensive experiments demonstrate that MetaEarth-MM not only exhibits strong generative capability and robust generalization across diverse generation tasks, but also supports downstream tasks at both data and representation levels, highlighting its potential as a general foundation model for cross-modal Earth observation. The code and dataset will be available at https://github.com/YZPioneer/MetaEarth-MM.
CloudMamba: An Uncertainty-Guided Dual-Scale Mamba Network for Cloud Detection in Remote Sensing Imagery
Apr 08, 2026Cloud detection in remote sensing imagery is a fundamental, critical, and highly challenging problem. Existing deep learning-based cloud detection methods generally formulate it as a single-stage pixel-wise binary segmentation task with one forward pass. However, such single-stage approaches exhibit ambiguity and uncertainty in thin-cloud regions and struggle to accurately handle fragmented clouds and boundary details. In this paper, we propose a novel deep learning framework termed CloudMamba. To address the ambiguity in thin-cloud regions, we introduce an uncertainty-guided two-stage cloud detection strategy. An embedded uncertainty estimation module is proposed to automatically quantify the confidence of thin-cloud segmentation, and a second-stage refinement segmentation is introduced to improve the accuracy in low-confidence hard regions. To better handle fragmented clouds and fine-grained boundary details, we design a dual-scale Mamba network based on a CNN-Mamba hybrid architecture. Compared with Transformer-based models with quadratic computational complexity, the proposed method maintains linear computational complexity while effectively capturing both large-scale structural characteristics and small-scale boundary details of clouds, enabling accurate delineation of overall cloud morphology and precise boundary segmentation. Extensive experiments conducted on the GF1_WHU and Levir_CS public datasets demonstrate that the proposed method outperforms existing approaches across multiple segmentation accuracy metrics, while offering high efficiency and process transparency. Our code is available at https://github.com/jayoungo/CloudMamba.
FoBa: A Foreground-Background co-Guided Method and New Benchmark for Remote Sensing Semantic Change Detection
Sep 19, 2025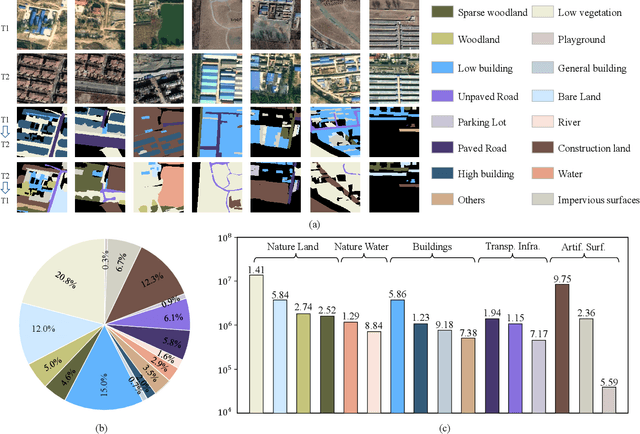
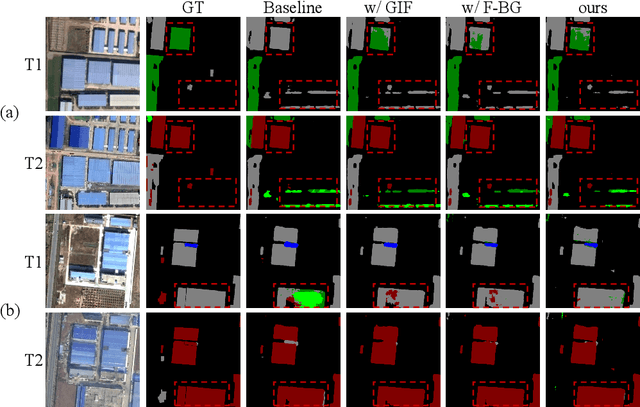
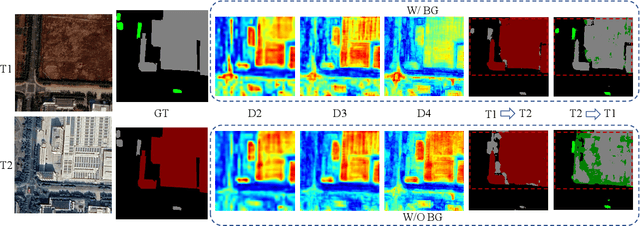
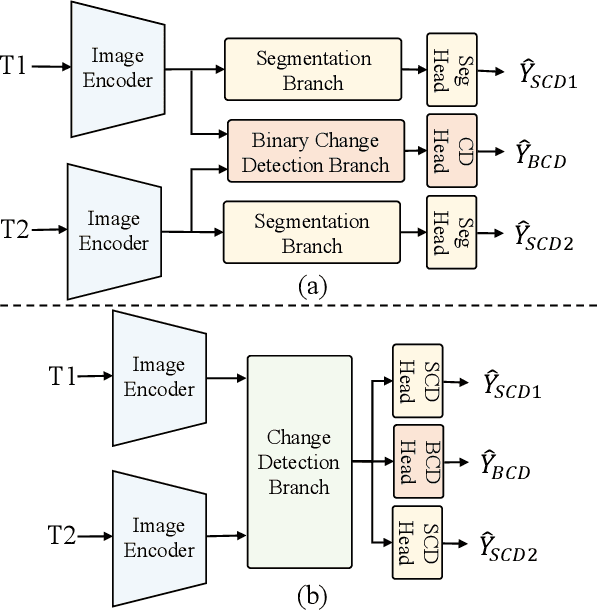
Despite the remarkable progress achieved in remote sensing semantic change detection (SCD), two major challenges remain. At the data level, existing SCD datasets suffer from limited change categories, insufficient change types, and a lack of fine-grained class definitions, making them inadequate to fully support practical applications. At the methodological level, most current approaches underutilize change information, typically treating it as a post-processing step to enhance spatial consistency, which constrains further improvements in model performance. To address these issues, we construct a new benchmark for remote sensing SCD, LevirSCD. Focused on the Beijing area, the dataset covers 16 change categories and 210 specific change types, with more fine-grained class definitions (e.g., roads are divided into unpaved and paved roads). Furthermore, we propose a foreground-background co-guided SCD (FoBa) method, which leverages foregrounds that focus on regions of interest and backgrounds enriched with contextual information to guide the model collaboratively, thereby alleviating semantic ambiguity while enhancing its ability to detect subtle changes. Considering the requirements of bi-temporal interaction and spatial consistency in SCD, we introduce a Gated Interaction Fusion (GIF) module along with a simple consistency loss to further enhance the model's detection performance. Extensive experiments on three datasets (SECOND, JL1, and the proposed LevirSCD) demonstrate that FoBa achieves competitive results compared to current SOTA methods, with improvements of 1.48%, 3.61%, and 2.81% in the SeK metric, respectively. Our code and dataset are available at https://github.com/zmoka-zht/FoBa.
LatticeWorld: A Multimodal Large Language Model-Empowered Framework for Interactive Complex World Generation
Sep 05, 2025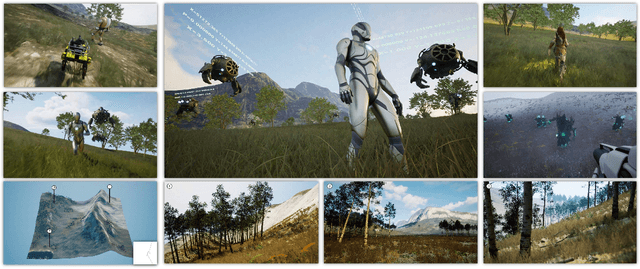
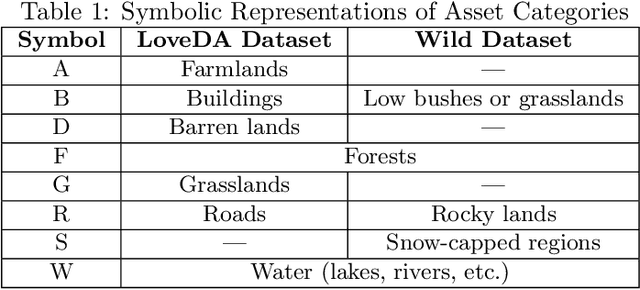
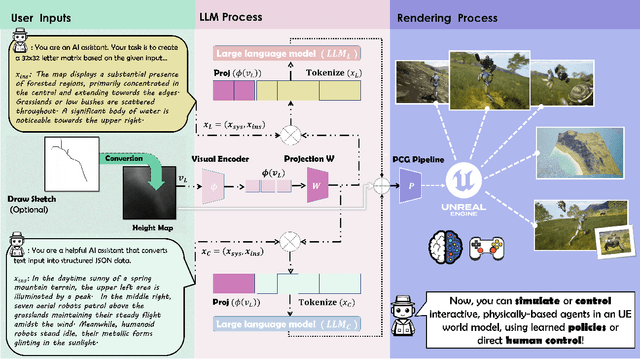
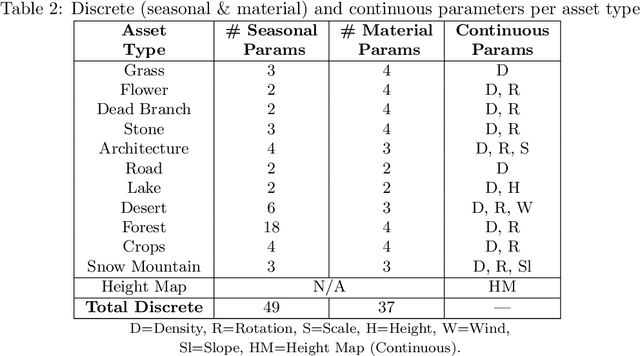
Recent research has been increasingly focusing on developing 3D world models that simulate complex real-world scenarios. World models have found broad applications across various domains, including embodied AI, autonomous driving, entertainment, etc. A more realistic simulation with accurate physics will effectively narrow the sim-to-real gap and allow us to gather rich information about the real world conveniently. While traditional manual modeling has enabled the creation of virtual 3D scenes, modern approaches have leveraged advanced machine learning algorithms for 3D world generation, with most recent advances focusing on generative methods that can create virtual worlds based on user instructions. This work explores such a research direction by proposing LatticeWorld, a simple yet effective 3D world generation framework that streamlines the industrial production pipeline of 3D environments. LatticeWorld leverages lightweight LLMs (LLaMA-2-7B) alongside the industry-grade rendering engine (e.g., Unreal Engine 5) to generate a dynamic environment. Our proposed framework accepts textual descriptions and visual instructions as multimodal inputs and creates large-scale 3D interactive worlds with dynamic agents, featuring competitive multi-agent interaction, high-fidelity physics simulation, and real-time rendering. We conduct comprehensive experiments to evaluate LatticeWorld, showing that it achieves superior accuracy in scene layout generation and visual fidelity. Moreover, LatticeWorld achieves over a $90\times$ increase in industrial production efficiency while maintaining high creative quality compared with traditional manual production methods. Our demo video is available at https://youtu.be/8VWZXpERR18
RSRefSeg 2: Decoupling Referring Remote Sensing Image Segmentation with Foundation Models
Jul 08, 2025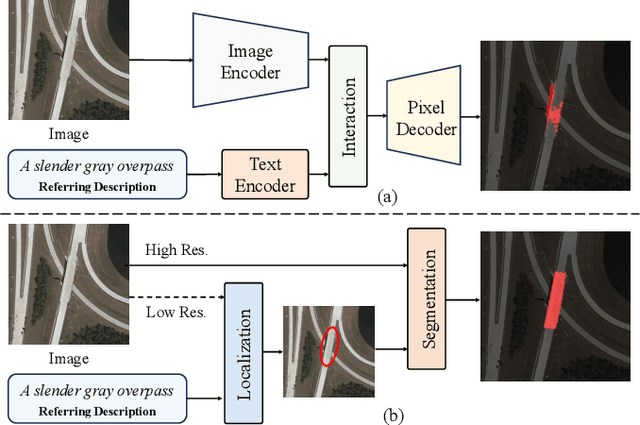
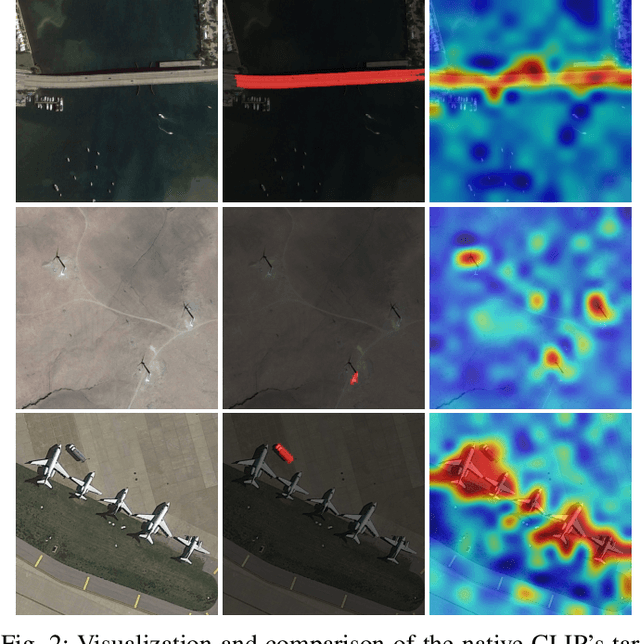
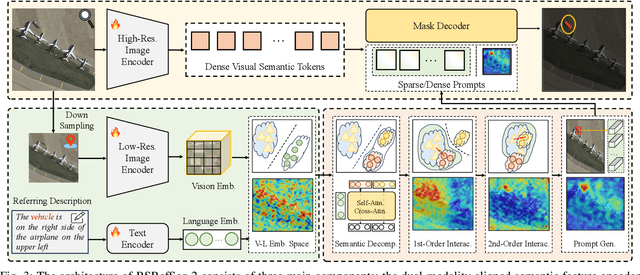
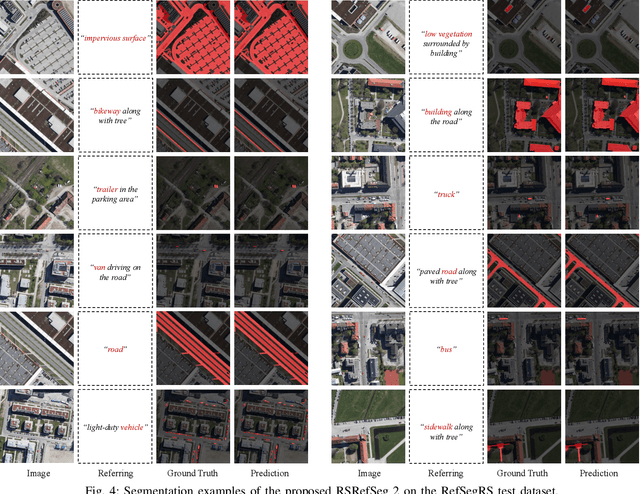
Referring Remote Sensing Image Segmentation provides a flexible and fine-grained framework for remote sensing scene analysis via vision-language collaborative interpretation. Current approaches predominantly utilize a three-stage pipeline encompassing dual-modal encoding, cross-modal interaction, and pixel decoding. These methods demonstrate significant limitations in managing complex semantic relationships and achieving precise cross-modal alignment, largely due to their coupled processing mechanism that conflates target localization with boundary delineation. This architectural coupling amplifies error propagation under semantic ambiguity while restricting model generalizability and interpretability. To address these issues, we propose RSRefSeg 2, a decoupling paradigm that reformulates the conventional workflow into a collaborative dual-stage framework: coarse localization followed by fine segmentation. RSRefSeg 2 integrates CLIP's cross-modal alignment strength with SAM's segmentation generalizability through strategic foundation model collaboration. Specifically, CLIP is employed as the dual-modal encoder to activate target features within its pre-aligned semantic space and generate localization prompts. To mitigate CLIP's misactivation challenges in multi-entity scenarios described by referring texts, a cascaded second-order prompter is devised, which enhances precision through implicit reasoning via decomposition of text embeddings into complementary semantic subspaces. These optimized semantic prompts subsequently direct the SAM to generate pixel-level refined masks, thereby completing the semantic transmission pipeline. Extensive experiments (RefSegRS, RRSIS-D, and RISBench) demonstrate that RSRefSeg 2 surpasses contemporary methods in segmentation accuracy (+~3% gIoU) and complex semantic interpretation. Code is available at: https://github.com/KyanChen/RSRefSeg2.
SeG-SR: Integrating Semantic Knowledge into Remote Sensing Image Super-Resolution via Vision-Language Model
May 29, 2025High-resolution (HR) remote sensing imagery plays a vital role in a wide range of applications, including urban planning and environmental monitoring. However, due to limitations in sensors and data transmission links, the images acquired in practice often suffer from resolution degradation. Remote Sensing Image Super-Resolution (RSISR) aims to reconstruct HR images from low-resolution (LR) inputs, providing a cost-effective and efficient alternative to direct HR image acquisition. Existing RSISR methods primarily focus on low-level characteristics in pixel space, while neglecting the high-level understanding of remote sensing scenes. This may lead to semantically inconsistent artifacts in the reconstructed results. Motivated by this observation, our work aims to explore the role of high-level semantic knowledge in improving RSISR performance. We propose a Semantic-Guided Super-Resolution framework, SeG-SR, which leverages Vision-Language Models (VLMs) to extract semantic knowledge from input images and uses it to guide the super resolution (SR) process. Specifically, we first design a Semantic Feature Extraction Module (SFEM) that utilizes a pretrained VLM to extract semantic knowledge from remote sensing images. Next, we propose a Semantic Localization Module (SLM), which derives a series of semantic guidance from the extracted semantic knowledge. Finally, we develop a Learnable Modulation Module (LMM) that uses semantic guidance to modulate the features extracted by the SR network, effectively incorporating high-level scene understanding into the SR pipeline. We validate the effectiveness and generalizability of SeG-SR through extensive experiments: SeG-SR achieves state-of-the-art performance on two datasets and consistently delivers performance improvements across various SR architectures. Codes can be found at https://github.com/Mr-Bamboo/SeG-SR.