 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLamarckian Inheritance Improves Robot Evolution in Dynamic Environments
Mar 28, 2024



This study explores the integration of Lamarckian system into evolutionary robotics (ER), comparing it with the traditional Darwinian model across various environments. By adopting Lamarckian principles, where robots inherit learned traits, alongside Darwinian learning without inheritance, we investigate adaptation in dynamic settings. Our research, conducted in six distinct environmental setups, demonstrates that Lamarckian systems outperform Darwinian ones in adaptability and efficiency, particularly in challenging conditions. Our analysis highlights the critical role of the interplay between controller \& morphological evolution and environment adaptation, with parent-offspring similarities and newborn \&survivors before and after learning providing insights into the effectiveness of trait inheritance. Our findings suggest Lamarckian principles could significantly advance autonomous system design, highlighting the potential for more adaptable and robust robotic solutions in complex, real-world applications. These theoretical insights were validated using real physical robots, bridging the gap between simulation and practical application.
A comparison of controller architectures and learning mechanisms for arbitrary robot morphologies
Sep 25, 2023



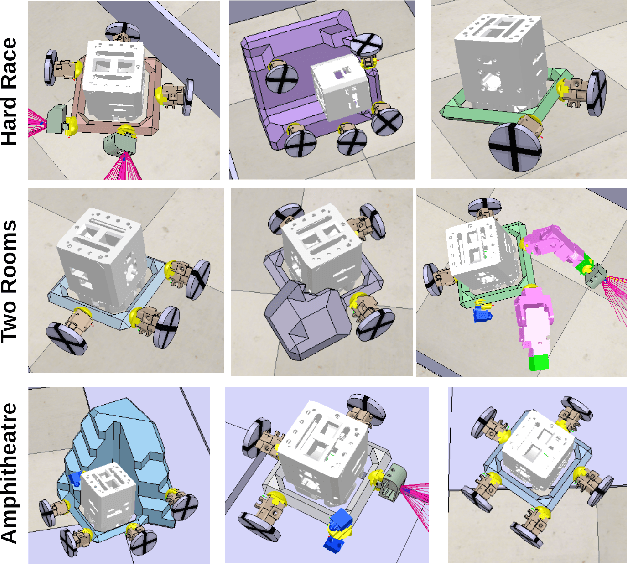
The main question this paper addresses is: What combination of a robot controller and a learning method should be used, if the morphology of the learning robot is not known in advance? Our interest is rooted in the context of morphologically evolving modular robots, but the question is also relevant in general, for system designers interested in widely applicable solutions. We perform an experimental comparison of three controller-and-learner combinations: one approach where controllers are based on modelling animal locomotion (Central Pattern Generators, CPG) and the learner is an evolutionary algorithm, a completely different method using Reinforcement Learning (RL) with a neural network controller architecture, and a combination `in-between' where controllers are neural networks and the learner is an evolutionary algorithm. We apply these three combinations to a test suite of modular robots and compare their efficacy, efficiency, and robustness. Surprisingly, the usual CPG-based and RL-based options are outperformed by the in-between combination that is more robust and efficient than the other two setups.
Lamarck's Revenge: Inheritance of Learned Traits Can Make Robot Evolution Better
Sep 22, 2023

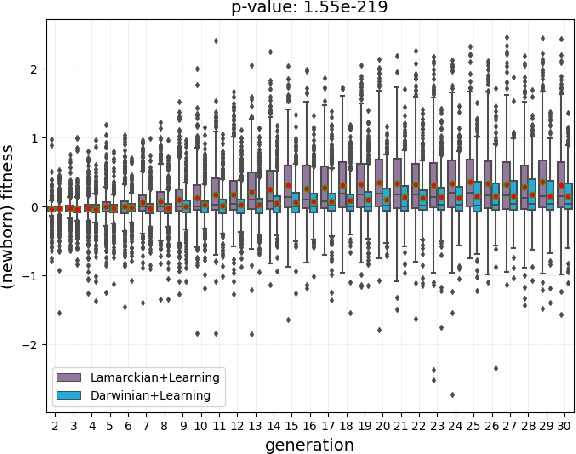

Evolutionary robot systems offer two principal advantages: an advanced way of developing robots through evolutionary optimization and a special research platform to conduct what-if experiments regarding questions about evolution. Our study sits at the intersection of these. We investigate the question ``What if the 18th-century biologist Lamarck was not completely wrong and individual traits learned during a lifetime could be passed on to offspring through inheritance?'' We research this issue through simulations with an evolutionary robot framework where morphologies (bodies) and controllers (brains) of robots are evolvable and robots also can improve their controllers through learning during their lifetime. Within this framework, we compare a Lamarckian system, where learned bits of the brain are inheritable, with a Darwinian system, where they are not. Analyzing simulations based on these systems, we obtain new insights about Lamarckian evolution dynamics and the interaction between evolution and learning. Specifically, we show that Lamarckism amplifies the emergence of `morphological intelligence', the ability of a given robot body to acquire a good brain by learning, and identify the source of this success: `newborn' robots have a higher fitness because their inherited brains match their bodies better than those in a Darwinian system.
A Comparative Study of Brain Reproduction Methods for Morphologically Evolving Robots
Mar 22, 2023In the most extensive robot evolution systems, both the bodies and the brains of the robots undergo evolution and the brains of 'infant' robots are also optimized by a learning process immediately after 'birth'. This paper is concerned with the brain evolution mechanism in such a system. In particular, we compare four options obtained by combining asexual or sexual brain reproduction with Darwinian or Lamarckian evolution mechanisms. We conduct experiments in simulation with a system of evolvable modular robots on two different tasks. The results show that sexual reproduction of the robots' brains is preferable in the Darwinian framework, but the effect is the opposite in the Lamarckian system (both using the same infant learning method). Our experiments suggest that the overall best option is asexual reproduction combined with the Lamarckian framework, as it obtains better robots in terms of fitness than the other three. Considering the evolved morphologies, the different brain reproduction methods do not lead to differences. This result indicates that the morphology of the robot is mainly determined by the task and the environment, not by the brain reproduction methods.
The Effects of Learning in Morphologically Evolving Robot Systems
Nov 18, 2021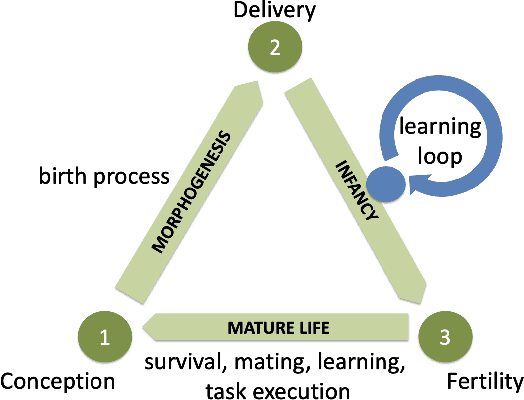
Simultaneously evolving morphologies (bodies) and controllers (brains) of robots can cause a mismatch between the inherited body and brain in the offspring. To mitigate this problem, the addition of an infant learning period by the so-called Triangle of Life framework has been proposed relatively long ago. However, an empirical assessment is still lacking to-date. In this paper we investigate the effects of such a learning mechanism from different perspectives. Using extensive simulations we show that learning can greatly increase task performance and reduce the number of generations required to reach a certain fitness level compared to the purely evolutionary approach. Furthermore, although learning only directly affects the controllers, we demonstrate that the evolved morphologies will be also different. This provides a quantitative demonstration that changes in the brain can induce changes in the body. Finally, we examine the concept of morphological intelligence quantified by the ability of a given body to learn. We observe that the learning delta, the performance difference between the inherited and the learned brain, is growing throughout the evolutionary process. This shows that evolution is producing robots with an increasing plasticity, that is, consecutive generations are becoming better and better learners which in turn makes them better and better at the given task. All in all, our results demonstrate that the Triangle of Life is not only a concept of theoretical interest, but a system architecture with practical benefits.
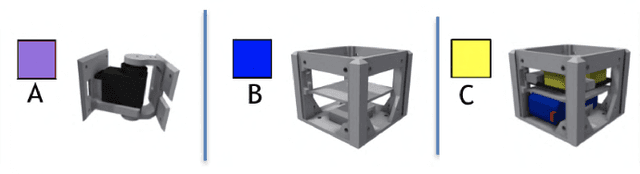
Morpho-evolution with learning using a controller archive as an inheritance mechanism
Apr 09, 2021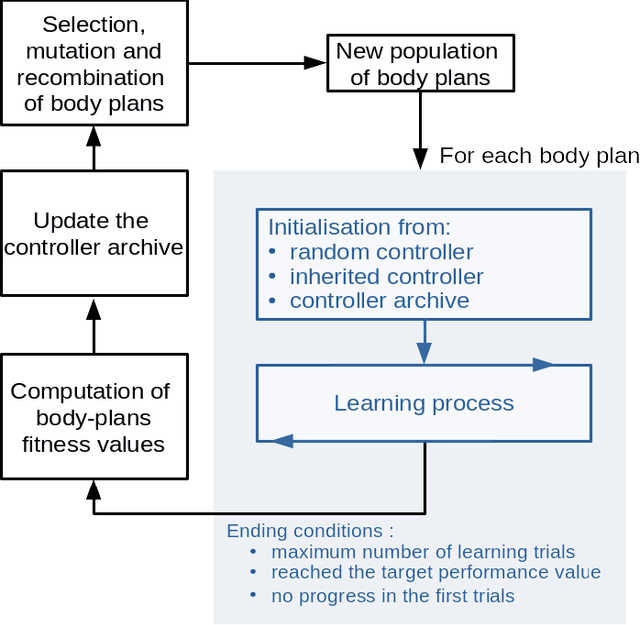
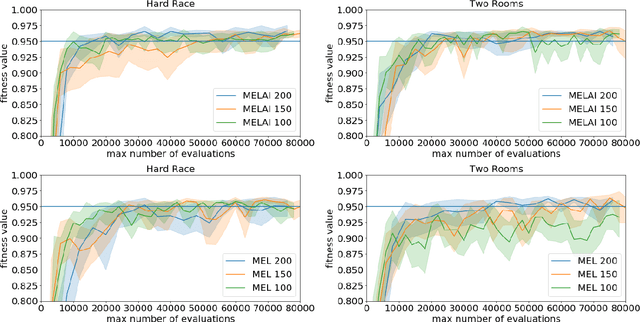
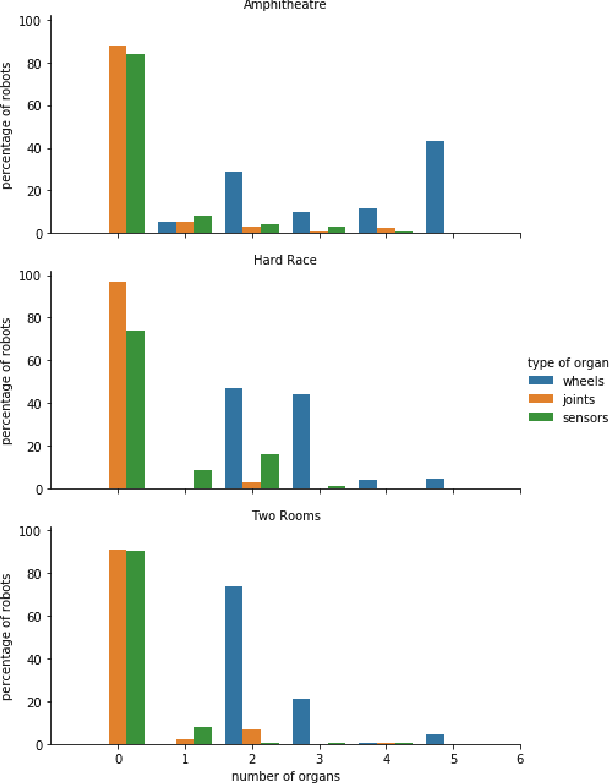
In evolutionary robotics, several approaches have been shown to be capable of the joint optimisation of body-plans and controllers by either using only evolution or combining evolution and learning. When working in rich morphological spaces, it is common for offspring to have body-plans that are very different from either of their parents, which can cause difficulties with respect to inheriting a suitable controller. To address this, we propose a framework that combines an evolutionary algorithm to generate body-plans and a learning algorithm to optimise the parameters of a neural controller where the topology of this controller is created once the body-plan of each offspring body-plan is generated. The key novelty of the approach is to add an external archive for storing learned controllers that map to explicit `types' of robots (where this is defined with respect the features of the body-plan). By inheriting an appropriate controller from the archive rather than learning from a randomly initialised one, we show that both the speed and magnitude of learning increases over time when compared to an approach that starts from scratch, using three different test-beds. The framework also provides new insights into the complex interactions between evolution and learning, and the role of morphological intelligence in robot design.
Population-based Optimization for Kinetic Parameter Identification in Glycolytic Pathway in Saccharomyces cerevisiae
Sep 19, 2020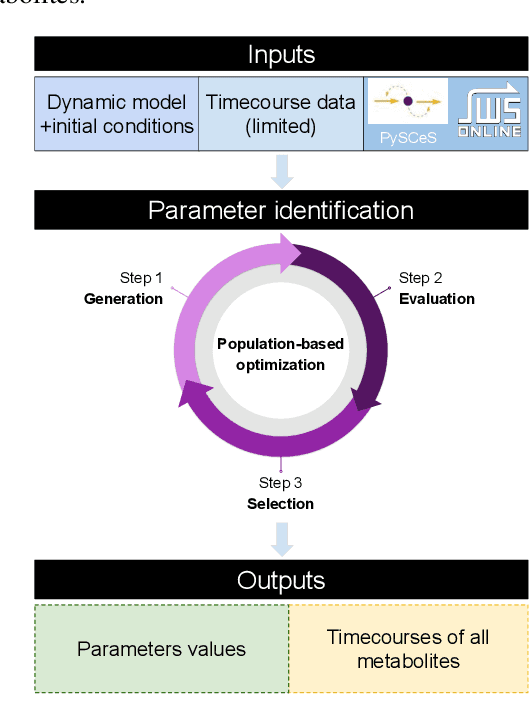
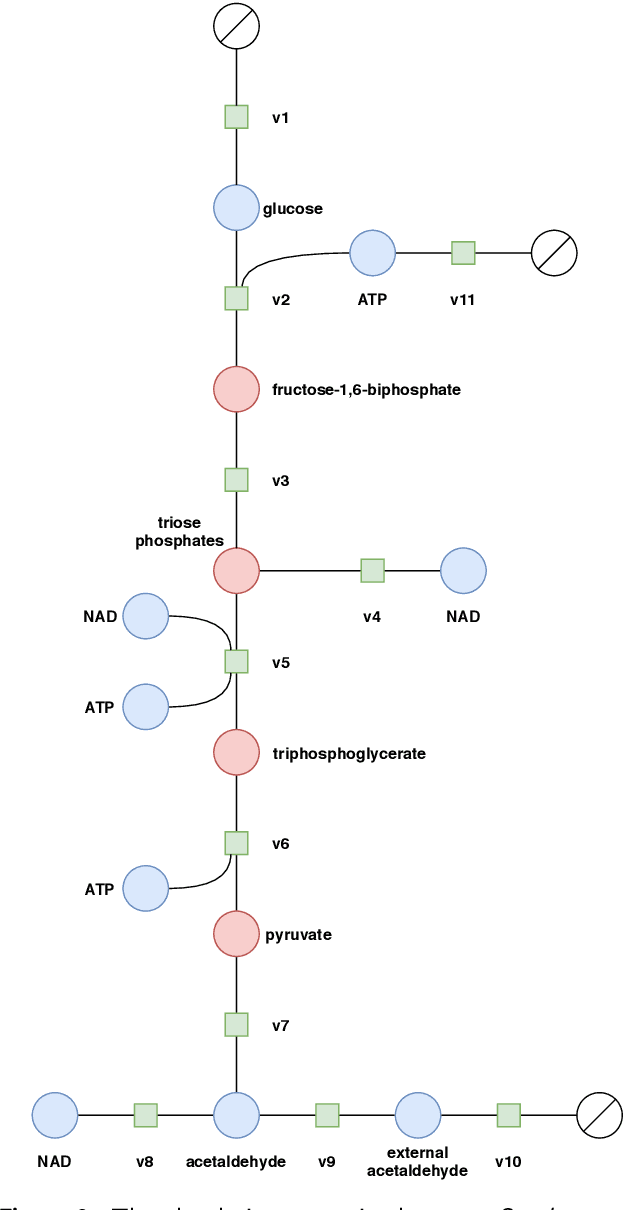

Models in systems biology are mathematical descriptions of biological processes that are used to answer questions and gain a better understanding of biological phenomena. Dynamic models represent the network through rates of the production and consumption for the individual species. The ordinary differential equations that describe rates of the reactions in the model include a set of parameters. The parameters are important quantities to understand and analyze biological systems. Moreover, the perturbation of the kinetic parameters are correlated with upregulation of the system by cell-intrinsic and cell-extrinsic factors, including mutations and the environment changes. Here, we aim at using well-established models of biological pathways to identify parameter values and point their potential perturbation/deviation. We present our population-based optimization framework that is able to identify kinetic parameters in the dynamic model based on only input and output data (i.e., timecourses of selected metabolites). Our approach can deal with the identification of the non-measurable parameters as well as with discovering deviation of the parameters. We present our proposed optimization framework on the example of the well-studied glycolytic pathway in Saccharomyces cerevisiae.
Differential Evolution with Reversible Linear Transformations
Feb 07, 2020
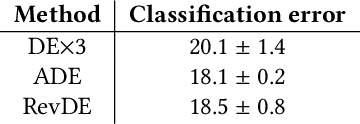
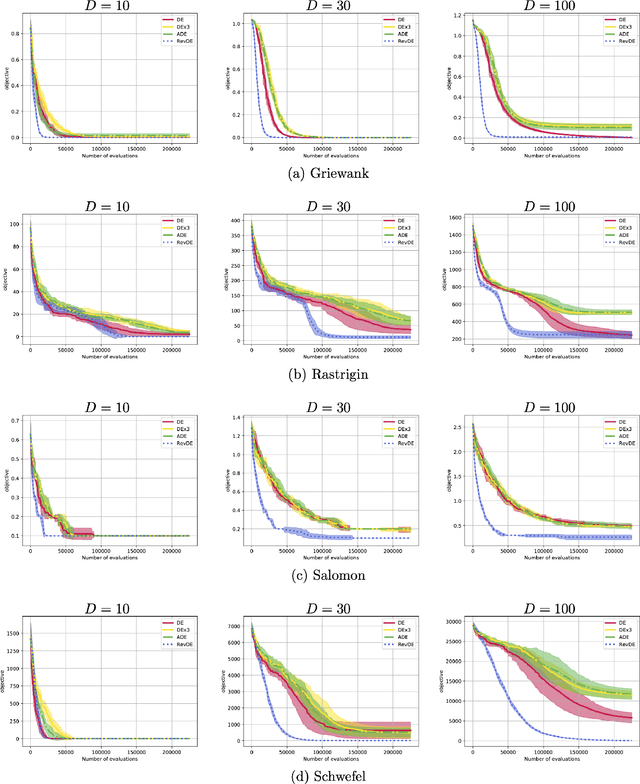
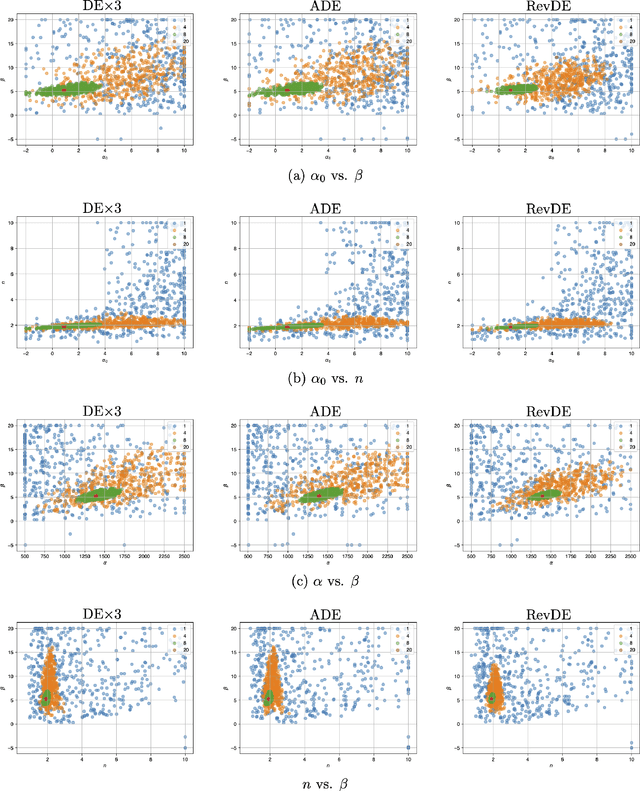
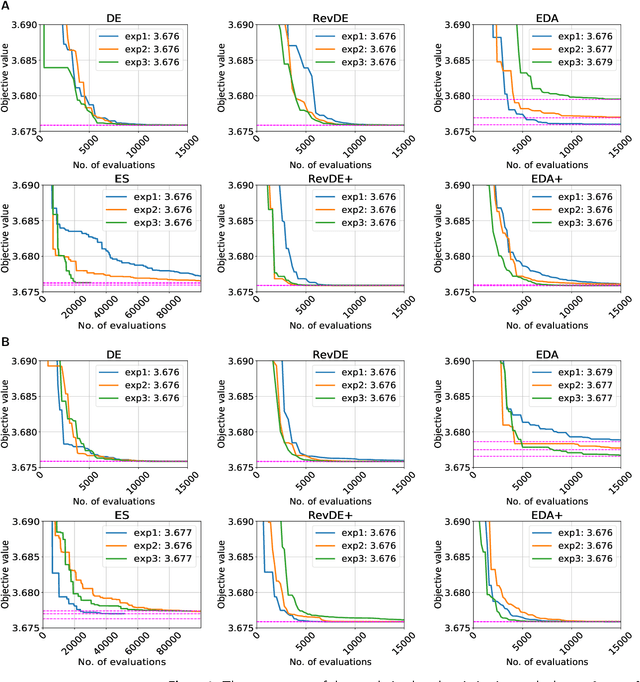
Differential evolution (DE) is a well-known type of evolutionary algorithms (EA). Similarly to other EA variants it can suffer from small populations and loose diversity too quickly. This paper presents a new approach to mitigate this issue: We propose to generate new candidate solutions by utilizing reversible linear transformation applied to a triplet of solutions from the population. In other words, the population is enlarged by using newly generated individuals without evaluating their fitness. We assess our methods on three problems: (i) benchmark function optimization, (ii) discovering parameter values of the gene repressilator system, (iii) learning neural networks. The empirical results indicate that the proposed approach outperforms vanilla DE and a version of DE with applying differential mutation three times on all testbeds.
Evolving embodied intelligence from materials to machines
Jan 17, 2019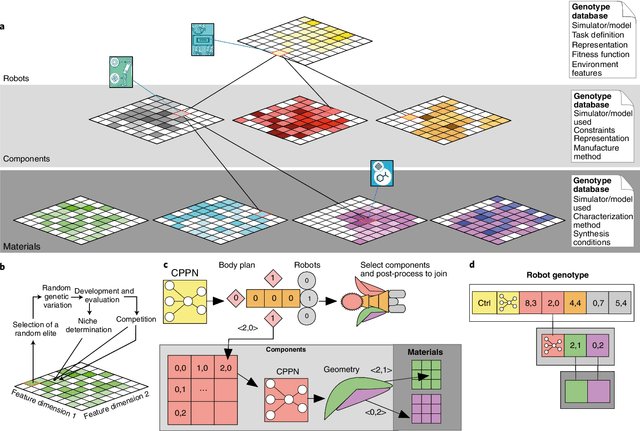
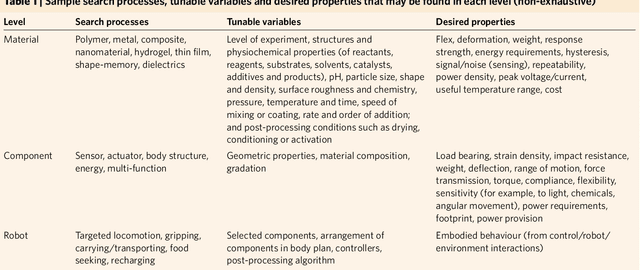
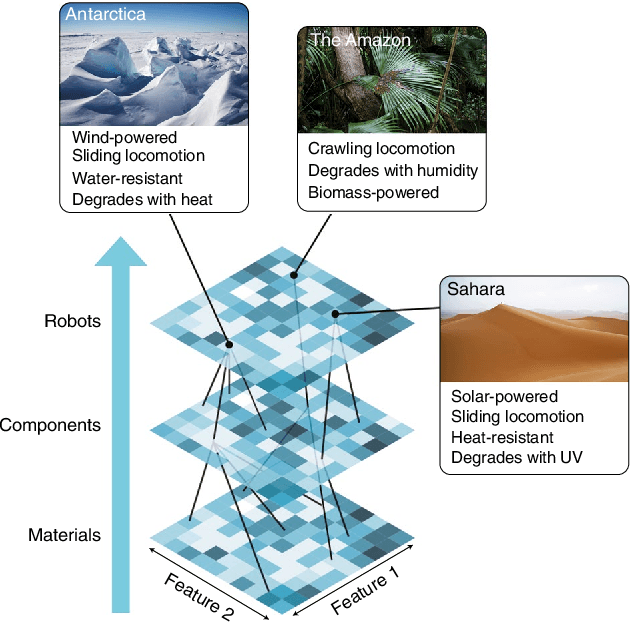
Natural lifeforms specialise to their environmental niches across many levels; from low-level features such as DNA and proteins, through to higher-level artefacts including eyes, limbs, and overarching body plans. We propose Multi-Level Evolution (MLE), a bottom-up automatic process that designs robots across multiple levels and niches them to tasks and environmental conditions. MLE concurrently explores constituent molecular and material 'building blocks', as well as their possible assemblies into specialised morphological and sensorimotor configurations. MLE provides a route to fully harness a recent explosion in available candidate materials and ongoing advances in rapid manufacturing processes. We outline a feasible MLE architecture that realises this vision, highlight the main roadblocks and how they may be overcome, and show robotic applications to which MLE is particularly suited. By forming a research agenda to stimulate discussion between researchers in related fields, we hope to inspire the pursuit of multi-level robotic design all the way from material to machine.