 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvolving embodied intelligence from materials to machines
Paper and Code
Jan 17, 2019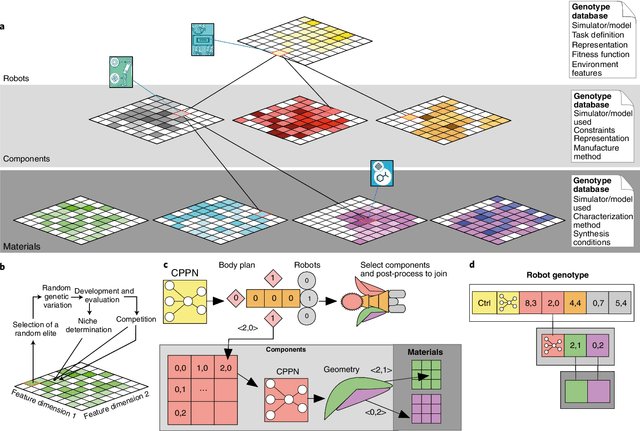
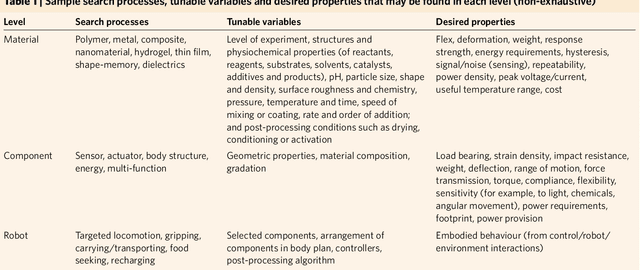
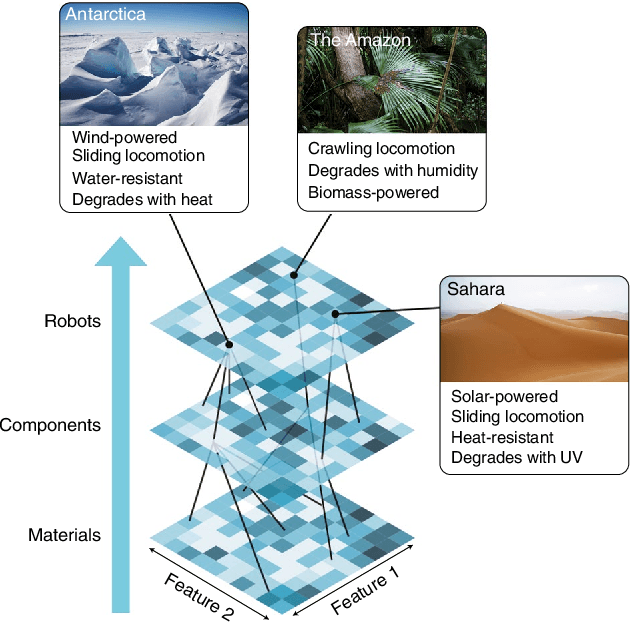
Natural lifeforms specialise to their environmental niches across many levels; from low-level features such as DNA and proteins, through to higher-level artefacts including eyes, limbs, and overarching body plans. We propose Multi-Level Evolution (MLE), a bottom-up automatic process that designs robots across multiple levels and niches them to tasks and environmental conditions. MLE concurrently explores constituent molecular and material 'building blocks', as well as their possible assemblies into specialised morphological and sensorimotor configurations. MLE provides a route to fully harness a recent explosion in available candidate materials and ongoing advances in rapid manufacturing processes. We outline a feasible MLE architecture that realises this vision, highlight the main roadblocks and how they may be overcome, and show robotic applications to which MLE is particularly suited. By forming a research agenda to stimulate discussion between researchers in related fields, we hope to inspire the pursuit of multi-level robotic design all the way from material to machine.