 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLamarck's Revenge: Inheritance of Learned Traits Can Make Robot Evolution Better
Paper and Code


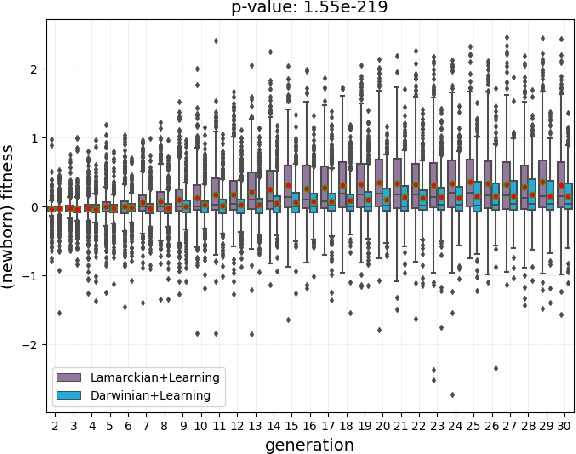

Evolutionary robot systems offer two principal advantages: an advanced way of developing robots through evolutionary optimization and a special research platform to conduct what-if experiments regarding questions about evolution. Our study sits at the intersection of these. We investigate the question ``What if the 18th-century biologist Lamarck was not completely wrong and individual traits learned during a lifetime could be passed on to offspring through inheritance?'' We research this issue through simulations with an evolutionary robot framework where morphologies (bodies) and controllers (brains) of robots are evolvable and robots also can improve their controllers through learning during their lifetime. Within this framework, we compare a Lamarckian system, where learned bits of the brain are inheritable, with a Darwinian system, where they are not. Analyzing simulations based on these systems, we obtain new insights about Lamarckian evolution dynamics and the interaction between evolution and learning. Specifically, we show that Lamarckism amplifies the emergence of `morphological intelligence', the ability of a given robot body to acquire a good brain by learning, and identify the source of this success: `newborn' robots have a higher fitness because their inherited brains match their bodies better than those in a Darwinian system.