 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA comparison of controller architectures and learning mechanisms for arbitrary robot morphologies
Sep 25, 2023



The main question this paper addresses is: What combination of a robot controller and a learning method should be used, if the morphology of the learning robot is not known in advance? Our interest is rooted in the context of morphologically evolving modular robots, but the question is also relevant in general, for system designers interested in widely applicable solutions. We perform an experimental comparison of three controller-and-learner combinations: one approach where controllers are based on modelling animal locomotion (Central Pattern Generators, CPG) and the learner is an evolutionary algorithm, a completely different method using Reinforcement Learning (RL) with a neural network controller architecture, and a combination `in-between' where controllers are neural networks and the learner is an evolutionary algorithm. We apply these three combinations to a test suite of modular robots and compare their efficacy, efficiency, and robustness. Surprisingly, the usual CPG-based and RL-based options are outperformed by the in-between combination that is more robust and efficient than the other two setups.
Lamarck's Revenge: Inheritance of Learned Traits Can Make Robot Evolution Better
Sep 22, 2023

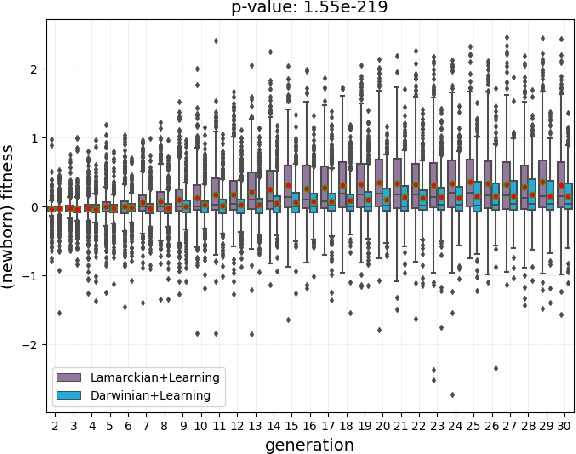

Evolutionary robot systems offer two principal advantages: an advanced way of developing robots through evolutionary optimization and a special research platform to conduct what-if experiments regarding questions about evolution. Our study sits at the intersection of these. We investigate the question ``What if the 18th-century biologist Lamarck was not completely wrong and individual traits learned during a lifetime could be passed on to offspring through inheritance?'' We research this issue through simulations with an evolutionary robot framework where morphologies (bodies) and controllers (brains) of robots are evolvable and robots also can improve their controllers through learning during their lifetime. Within this framework, we compare a Lamarckian system, where learned bits of the brain are inheritable, with a Darwinian system, where they are not. Analyzing simulations based on these systems, we obtain new insights about Lamarckian evolution dynamics and the interaction between evolution and learning. Specifically, we show that Lamarckism amplifies the emergence of `morphological intelligence', the ability of a given robot body to acquire a good brain by learning, and identify the source of this success: `newborn' robots have a higher fitness because their inherited brains match their bodies better than those in a Darwinian system.
Conditional Channel Gated Networks for Task-Aware Continual Learning
Mar 31, 2020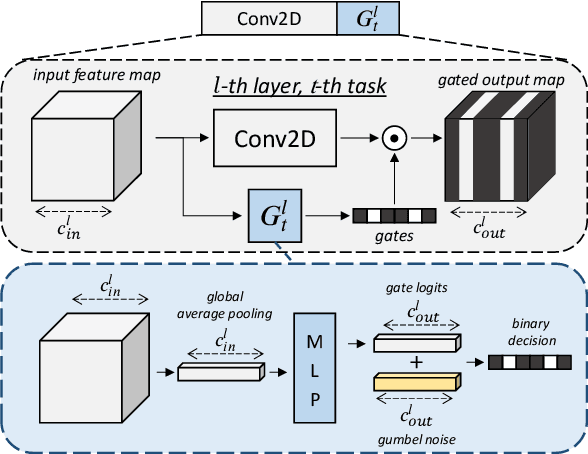

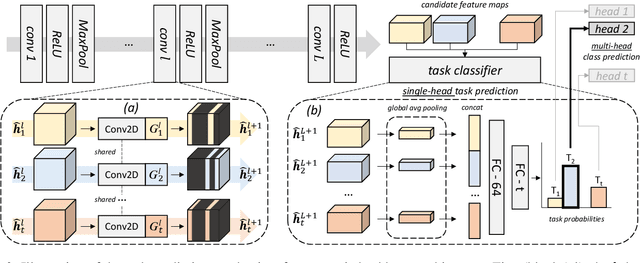
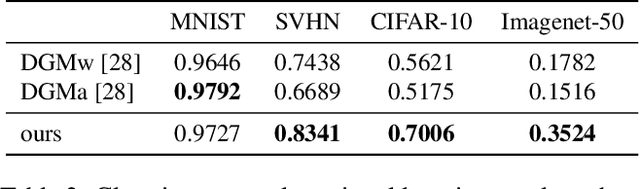
Convolutional Neural Networks experience catastrophic forgetting when optimized on a sequence of learning problems: as they meet the objective of the current training examples, their performance on previous tasks drops drastically. In this work, we introduce a novel framework to tackle this problem with conditional computation. We equip each convolutional layer with task-specific gating modules, selecting which filters to apply on the given input. This way, we achieve two appealing properties. Firstly, the execution patterns of the gates allow to identify and protect important filters, ensuring no loss in the performance of the model for previously learned tasks. Secondly, by using a sparsity objective, we can promote the selection of a limited set of kernels, allowing to retain sufficient model capacity to digest new tasks.Existing solutions require, at test time, awareness of the task to which each example belongs to. This knowledge, however, may not be available in many practical scenarios. Therefore, we additionally introduce a task classifier that predicts the task label of each example, to deal with settings in which a task oracle is not available. We validate our proposal on four continual learning datasets. Results show that our model consistently outperforms existing methods both in the presence and the absence of a task oracle. Notably, on Split SVHN and Imagenet-50 datasets, our model yields up to 23.98% and 17.42% improvement in accuracy w.r.t. competing methods.