 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Investigation of the Factors Influencing Evolutionary Dynamics in the Joint Evolution of Robot Body and Control
Mar 15, 2024



In evolutionary robotics, jointly optimising the design and the controller of robots is a challenging task due to the huge complexity of the solution space formed by the possible combinations of body and controller. We focus on the evolution of robots that can be physically created rather than just simulated, in a rich morphological space that includes a voxel-based chassis, wheels, legs and sensors. On the one hand, this space offers a high degree of liberty in the range of robots that can be produced, while on the other hand introduces a complexity rarely dealt with in previous works relating to matching controllers to designs and in evolving closed-loop control. This is usually addressed by augmenting evolution with a learning algorithm to refine controllers. Although several frameworks exist, few have studied the role of the \textit{evolutionary dynamics} of the intertwined `evolution+learning' processes in realising high-performing robots. We conduct an in-depth study of the factors that influence these dynamics, specifically: synchronous vs asynchronous evolution; the mechanism for replacing parents with offspring, and rewarding goal-based fitness vs novelty via selection. Results show that asynchronicity combined with goal-based selection and a `replace worst' strategy results in the highest performance.
Understanding fitness landscapes in morpho-evolution via local optima networks
Feb 12, 2024



Morpho-evolution (ME) refers to the simultaneous optimisation of a robot's design and controller to maximise performance given a task and environment. Many genetic encodings have been proposed which are capable of representing design and control. Previous research has provided empirical comparisons between encodings in terms of their performance with respect to an objective function and the diversity of designs that are evaluated, however there has been no attempt to explain the observed findings. We address this by applying Local Optima Network (LON) analysis to investigate the structure of the fitness landscapes induced by three different encodings when evolving a robot for a locomotion task, shedding new light on the ease by which different fitness landscapes can be traversed by a search process. This is the first time LON analysis has been applied in the field of ME despite its popularity in combinatorial optimisation domains; the findings will facilitate design of new algorithms or operators that are customised to ME landscapes in the future.
Morpho-evolution with learning using a controller archive as an inheritance mechanism
Apr 09, 2021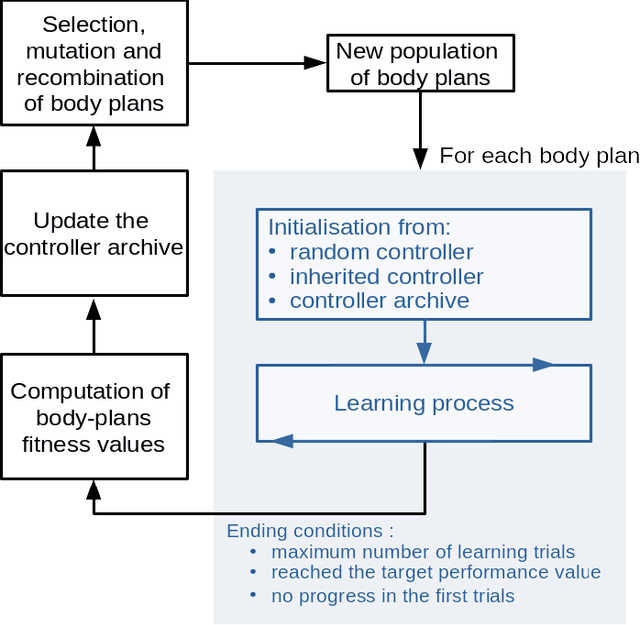
In evolutionary robotics, several approaches have been shown to be capable of the joint optimisation of body-plans and controllers by either using only evolution or combining evolution and learning. When working in rich morphological spaces, it is common for offspring to have body-plans that are very different from either of their parents, which can cause difficulties with respect to inheriting a suitable controller. To address this, we propose a framework that combines an evolutionary algorithm to generate body-plans and a learning algorithm to optimise the parameters of a neural controller where the topology of this controller is created once the body-plan of each offspring body-plan is generated. The key novelty of the approach is to add an external archive for storing learned controllers that map to explicit `types' of robots (where this is defined with respect the features of the body-plan). By inheriting an appropriate controller from the archive rather than learning from a randomly initialised one, we show that both the speed and magnitude of learning increases over time when compared to an approach that starts from scratch, using three different test-beds. The framework also provides new insights into the complex interactions between evolution and learning, and the role of morphological intelligence in robot design.