 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeASALT: Adaptive State Alignment for Lateral Transfer in Multi-agent Reinforcement Learning
Jun 23, 2026Multi-agent reinforcement learning (MARL) addresses the problem of training multiple agents that pursue collaborative, competitive, or mixed objectives. Prior work has investigated transfer learning between source and target domains in MARL; however, the majority of existing approaches impose the constraint that the dimensionalities of the observation space and the global state space must be identical across domains. In this paper, we introduce a method that explicitly accommodates mismatched state-space dimensionalities between source and target domains. The proposed approach, ASALT, incorporates both observation-level and state-level adapters that map the target-domain observations and global states into a shared embedding space, thereby enabling more effective transfer of knowledge across both actors and critics. These adapters can generate embeddings that support efficient strategy transfer across heterogeneous domains. Experimental results on multiple configurations in standard benchmark environments demonstrate that ASALT surpasses existing baselines in terms of sample efficiency and global return in cooperative settings, but its effectiveness depends on the degree of mismatch between source and target domains. Furthermore, our findings indicate that ASALT mitigates negative transfer, which frequently constitutes a major obstacle when transferring policies between domains with differing observation and action spaces.
Machine Learning (ML)-assisted Beam Management in millimeter (mm)Wave Distributed Multiple Input Multiple Output (D-MIMO) systems
Dec 30, 2023



Beam management (BM) protocols are critical for establishing and maintaining connectivity between network radio nodes and User Equipments (UEs). In Distributed Multiple Input Multiple Output systems (D-MIMO), a number of access points (APs), coordinated by a central processing unit (CPU), serves a number of UEs. At mmWave frequencies, the problem of finding the best AP and beam to serve the UEs is challenging due to a large number of beams that need to be sounded with Downlink (DL) reference signals. The objective of this paper is to investigate whether the best AP/beam can be reliably inferred from sounding only a small subset of beams and leveraging AI/ML for inference of best beam/AP. We use Random Forest (RF), MissForest (MF) and conditional Generative Adversarial Networks (c-GAN) for demonstrating the performance benefits of inference.
LogAnMeta: Log Anomaly Detection Using Meta Learning
Dec 21, 2022



Modern telecom systems are monitored with performance and system logs from multiple application layers and components. Detecting anomalous events from these logs is key to identify security breaches, resource over-utilization, critical/fatal errors, etc. Current supervised log anomaly detection frameworks tend to perform poorly on new types or signatures of anomalies with few or unseen samples in the training data. In this work, we propose a meta-learning-based log anomaly detection framework (LogAnMeta) for detecting anomalies from sequence of log events with few samples. LoganMeta train a hybrid few-shot classifier in an episodic manner. The experimental results demonstrate the efficacy of our proposed method
Terrain Adaptive Gait Transitioning for a Quadruped Robot using Model Predictive Control
Jun 07, 2021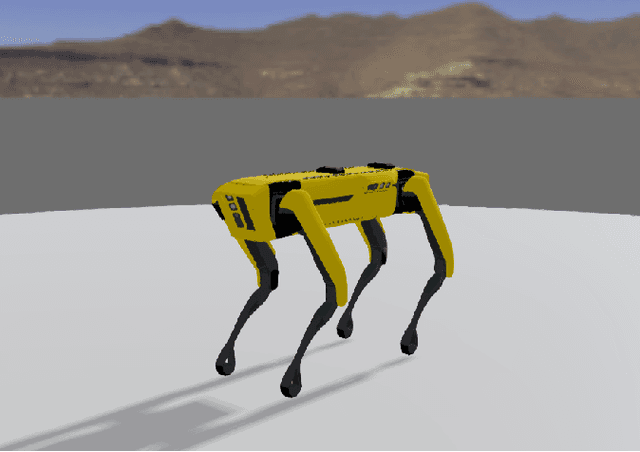
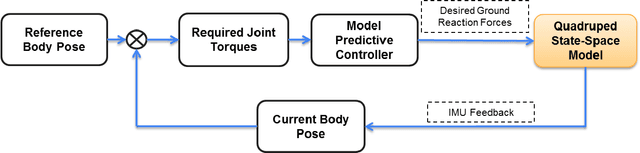
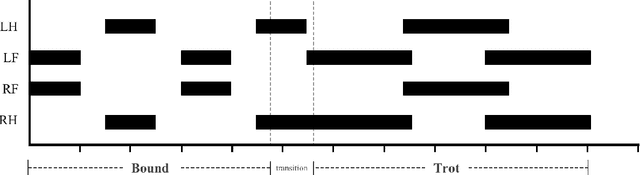
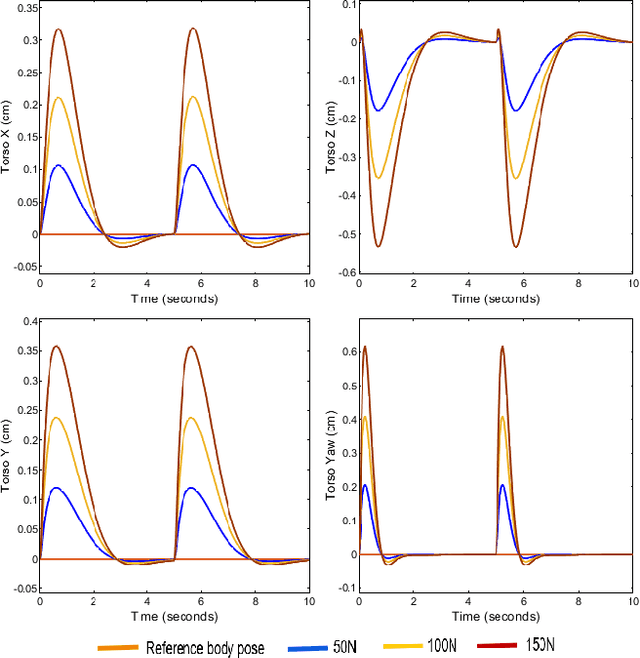
Legged robots can traverse challenging terrain, use perception to plan their safe foothold positions, and navigate the environment. Such unique mobility capabilities make these platforms a perfect candidate for scenarios such as search and rescue, inspection, and exploration tasks. While traversing through such terrains, the robot's instability is a significant concern. Many times the robot needs to switch gaits depending on its environment. Due to the complex dynamics of quadruped robots, classical PID control fails to provide high stability. Thus, there is a need for advanced control methods like the Model Predictive Control (MPC) which uses the system model and the nature of the terrain in order to predict the stable body pose of the robot. The controller also provides correction to any external disturbances that result in a change in the desired behavior of the robot. The MPC controller is designed in MATLAB, for full body torque control. The controller performance was verified on Boston Dynamics Spot in Webots simulator. The robot is able to provide correction for external perturbations up to 150 N and also resist falls till 80 cm.
Non-negative matrix factorization algorithms greatly improve topic model fits
May 27, 2021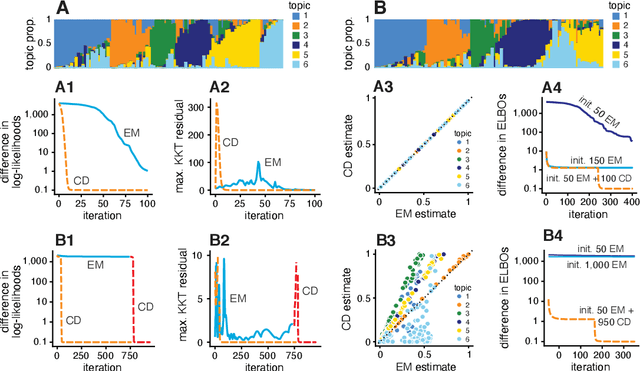
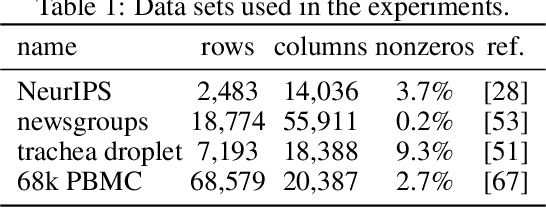
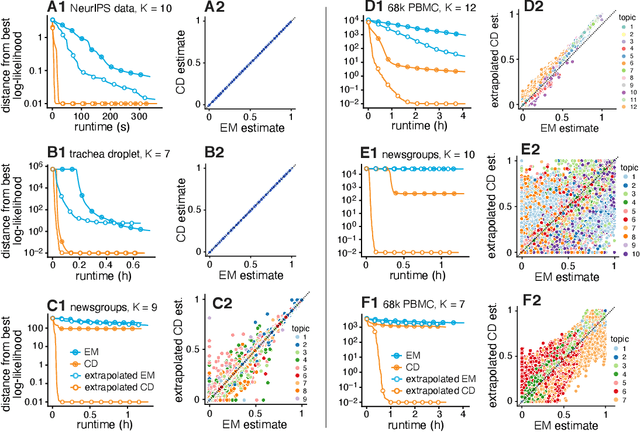
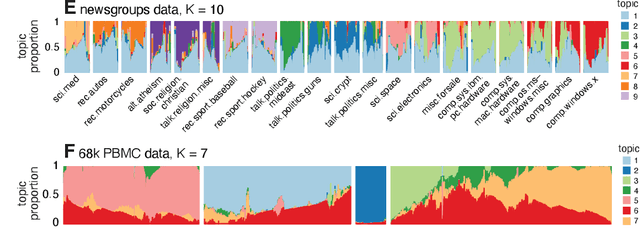
We report on the potential for using algorithms for non-negative matrix factorization (NMF) to improve parameter estimation in topic models. While several papers have studied connections between NMF and topic models, none have suggested leveraging these connections to develop new algorithms for fitting topic models. Importantly, NMF avoids the "sum-to-one" constraints on the topic model parameters, resulting in an optimization problem with simpler structure and more efficient computations. Building on recent advances in optimization algorithms for NMF, we show that first solving the NMF problem then recovering the topic model fit can produce remarkably better fits, and in less time, than standard algorithms for topic models. While we focus primarily on maximum likelihood estimation, we show that this approach also has the potential to improve variational inference for topic models. Our methods are implemented in the R package fastTopics.
Omnidirectional Three Module Robot Design and Simulation
Feb 19, 2020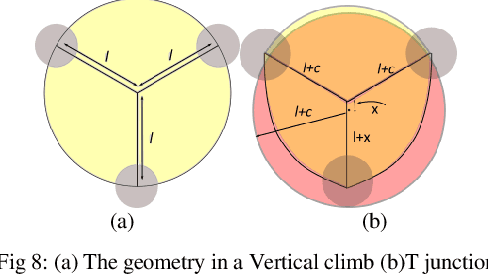
This paper introduces the Omnidirectional Tractable Three Module Robot for traversing inside complex pipe networks. The robot consists of three omnidirectional modules fixed 120{\deg} apart circumferentially which can rotate about their axis allowing holonomic motion of the robot. Holonomic motion enables the robot to overcome motion singularity when negotiating T-junctions and further allows the robot to arrive in a preferred orientation while taking turns inside a pipe. The singularity region while negotiating T-junctions is analyzed to formulate the geometry of the region. The design and motion capabilities are validated by conducting simulations in MSC ADAMS on a simplified lumped-model of the robot.
Omnidirectional Tractable Three Module Robot
Sep 23, 2019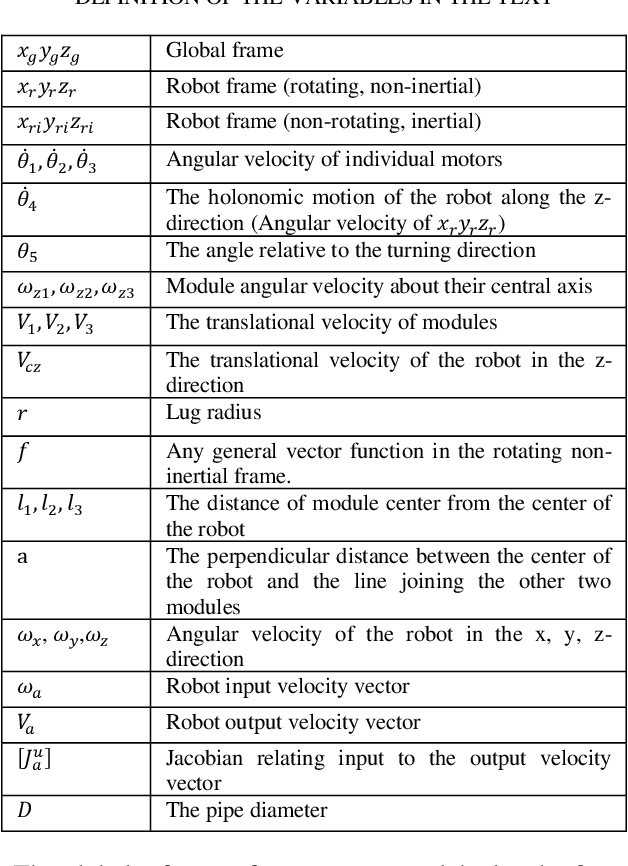
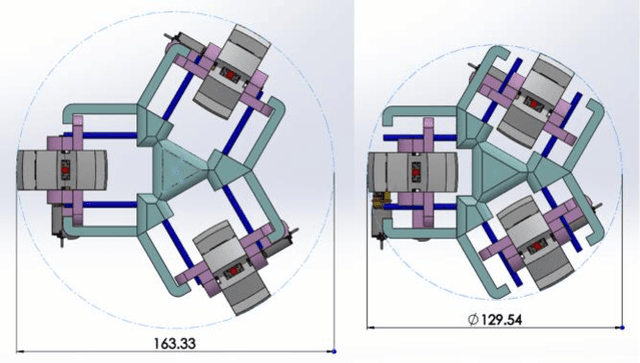
This paper introduces the Omnidirectional Tractable Three Module Robot for traversing inside complex pipe networks. The robot consists of three omnidirectional modules fixed 120{\deg} apart circumferentially which can rotate about their own axis allowing holonomic motion of the robot. The holonomic motion enables the robot to overcome motion singularity when negotiating T-junctions and further allows the robot to arrive in a preferred orientation while taking turns inside a pipe. We have developed a closed-form kinematic model for the robot in the paper and propose the Motion Singularity Region that the robot needs to avoid while negotiating T-junction. The design and motion capabilities of the robot are demonstrated both by conducting simulations in MSC ADAMS on a simplified lumped-model of the robot and with experiments on its physical embodiment.
Modular Pipe Climber
Sep 23, 2019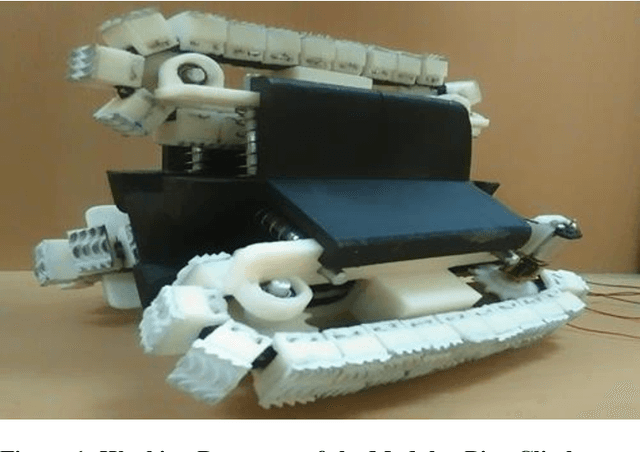
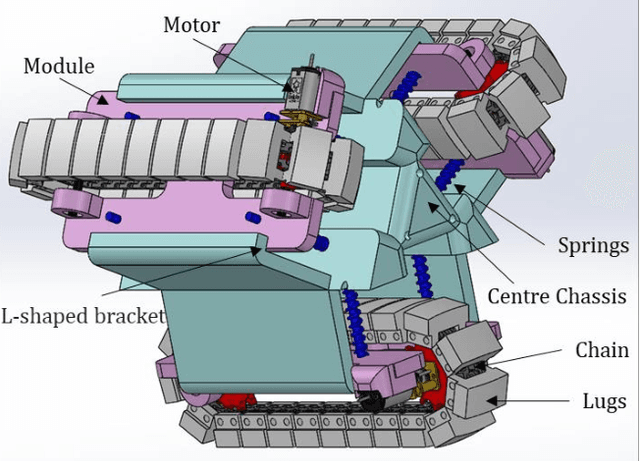
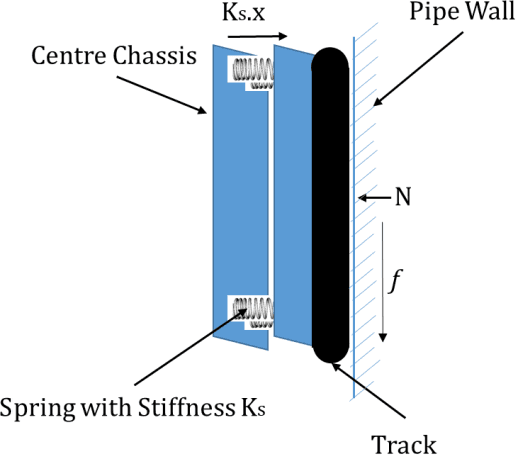
This paper discusses the design and implementation of the Modular Pipe Climber inside ASTM D1785 - 15e1 standard pipes [1]. The robot has three tracks which operate independently and are mounted on three modules which are oriented at 120{\deg} to each other. The tracks provide for greater surface traction compared to wheels [2]. The tracks are pushed onto the inner wall of the pipe by passive springs which help in maintaining the contact with the pipe during vertical climb and while turning in bends. The modules have the provision to compress asymmetrically, which helps the robot to take turns in bends in all directions. The motor torque required by the robot and the desired spring stiffness are calculated at quasistatic and static equilibriums when the pipe climber is in a vertical climb. The springs were further simulated and analyzed in ADAMS MSC. The prototype built based on these obtained values was experimented on, in complex pipe networks. Differential speed is employed when turning in bends to improve the efficiency and reduce the stresses experienced by the robot.
Causal Mediation Analysis Leveraging Multiple Types of Summary Statistics Data
Jan 24, 2019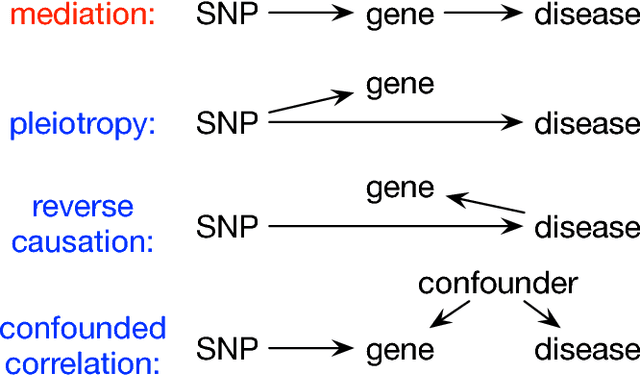
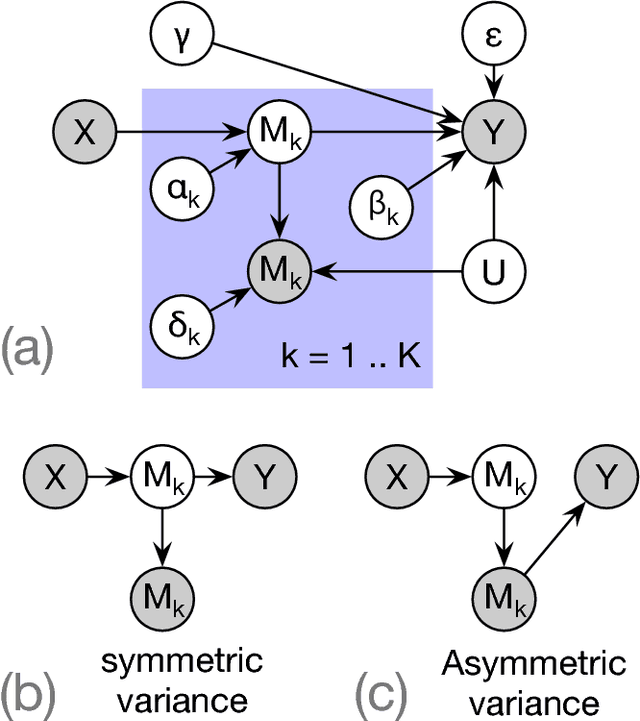
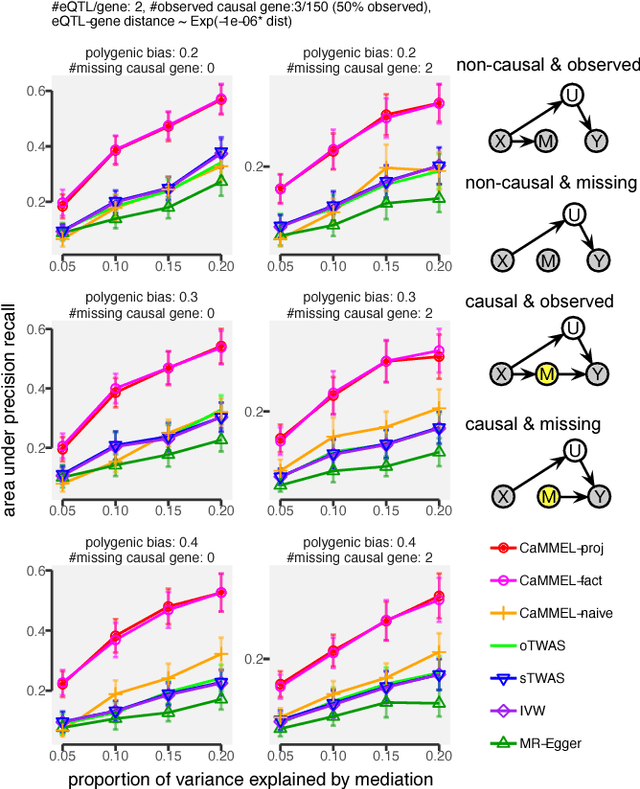
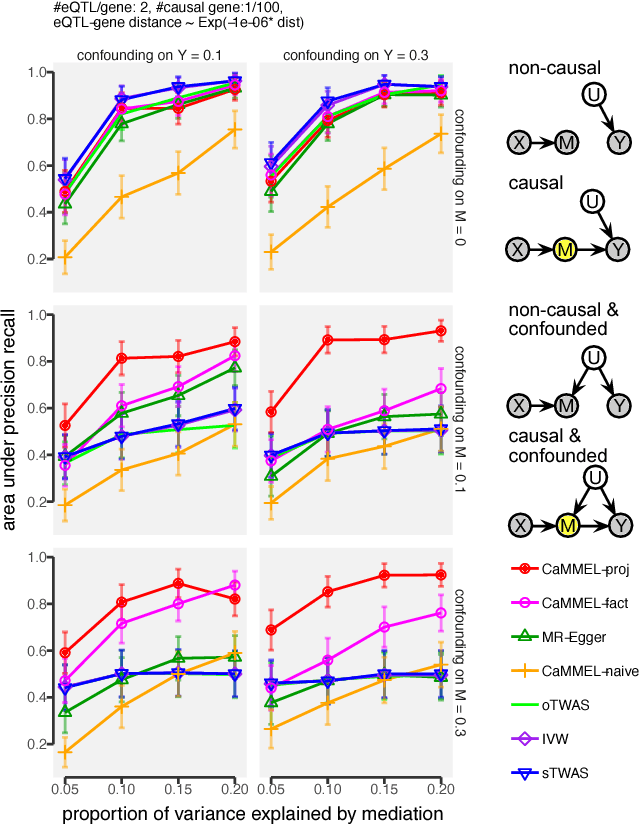
Summary statistics of genome-wide association studies (GWAS) teach causal relationship between millions of genetic markers and tens and thousands of phenotypes. However, underlying biological mechanisms are yet to be elucidated. We can achieve necessary interpretation of GWAS in a causal mediation framework, looking to establish a sparse set of mediators between genetic and downstream variables, but there are several challenges. Unlike existing methods rely on strong and unrealistic assumptions, we tackle practical challenges within a principled summary-based causal inference framework. We analyzed the proposed methods in extensive simulations generated from real-world genetic data. We demonstrated only our approach can accurately redeem causal genes, even without knowing actual individual-level data, despite the presence of competing non-causal trails.
Learning Coordinated Tasks using Reinforcement Learning in Humanoids
May 09, 2018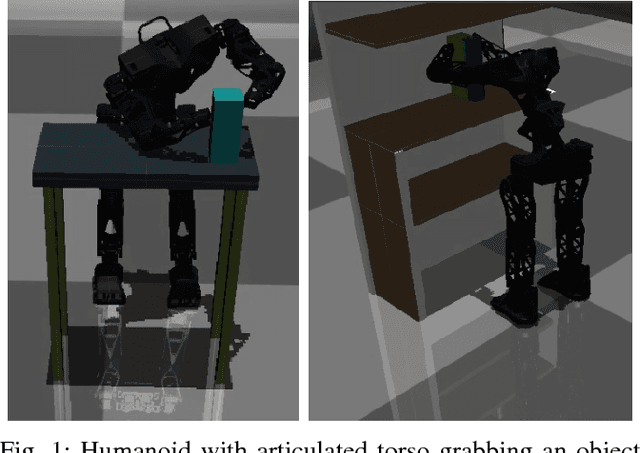
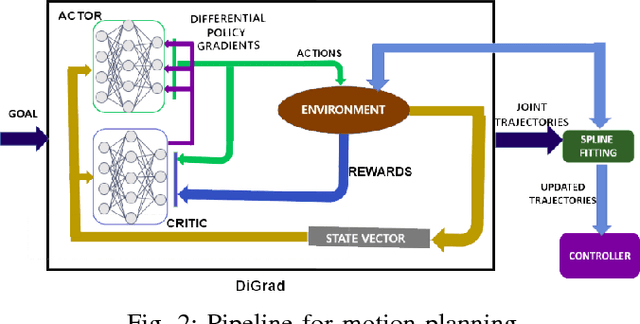
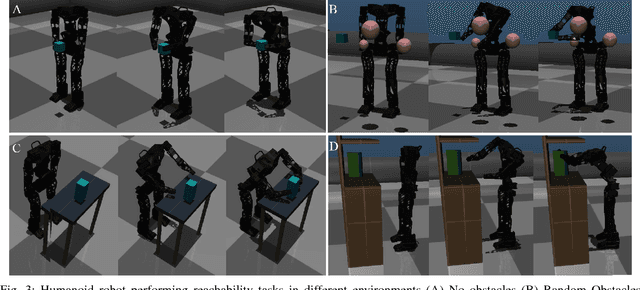
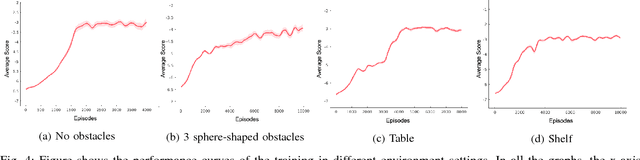
With the advent of artificial intelligence and machine learning, humanoid robots are made to learn a variety of skills which humans possess. One of fundamental skills which humans use in day-to-day activities is performing tasks with coordination between both the hands. In case of humanoids, learning such skills require optimal motion planning which includes avoiding collisions with the surroundings. In this paper, we propose a framework to learn coordinated tasks in cluttered environments based on DiGrad - A multi-task reinforcement learning algorithm for continuous action-spaces. Further, we propose an algorithm to smooth the joint space trajectories obtained by the proposed framework in order to reduce the noise instilled during training. The proposed framework was tested on a 27 degrees of freedom (DoF) humanoid with articulated torso for performing coordinated object-reaching task with both the hands in four different environments with varying levels of difficulty. It is observed that the humanoid is able to plan collision free trajectory in real-time. Simulation results also reveal the usefulness of the articulated torso for performing tasks which require coordination between both the arms.