 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNovel Compliant omnicrawler-wheel transforming module
Jul 10, 2018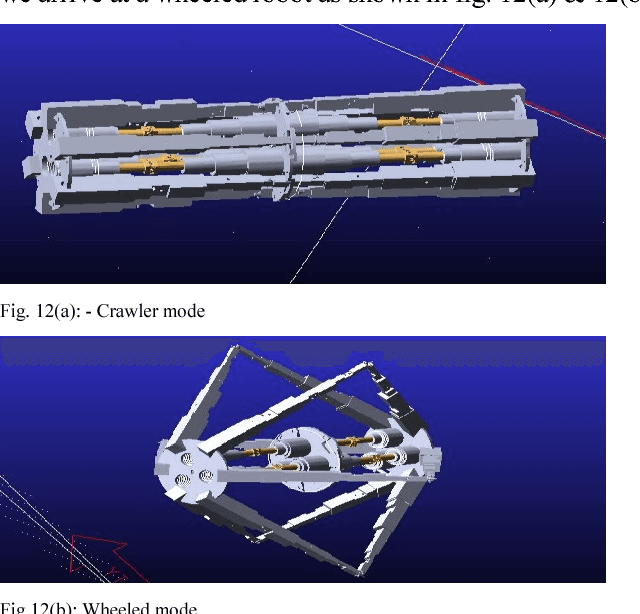
This paper presents a novel design of a crawler robot which is capable of transforming its chassis from an Omni crawler mode to a large-sized wheel mode using a novel mechanism. The transformation occurs without any additional actuators. Interestingly the robot can transform into a large diameter and small width wheel which enhances its maneuverability like small turning radius and fast/efficient locomotion. This paper contributes on improving the locomotion mode of previously developed hybrid compliant omnicrawler robot CObRaSO. In addition to legged and tracked mechanism, CObRaSO can now display large wheel mode which contributes to its locomotion capabilities. Mechanical design of the robot has been explained in a detailed manner in this paper and also the transforming experiment and torque analysis has been shown clearly
CObRaSO: Compliant Omni-Direction Bendable Hybrid Rigid and Soft OmniCrawler Module
Mar 12, 2018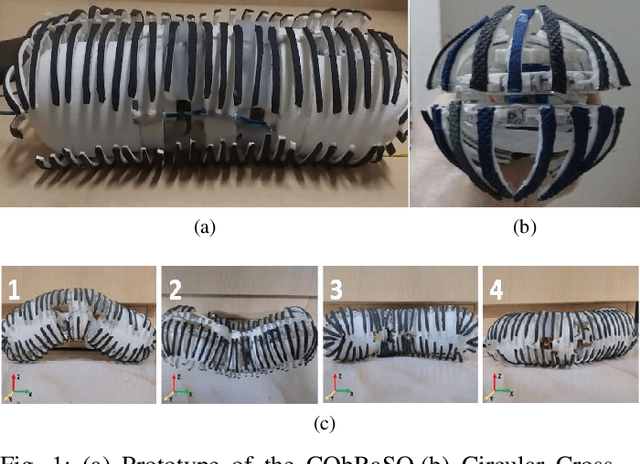
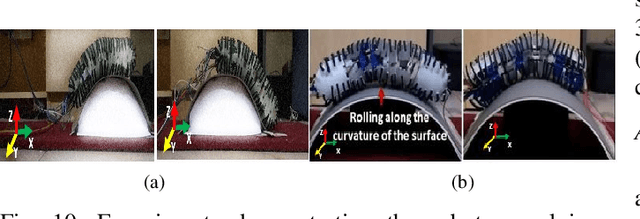
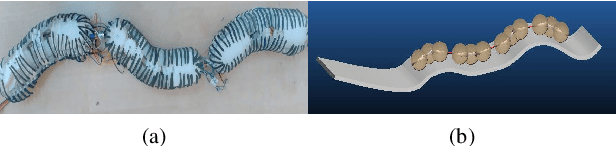
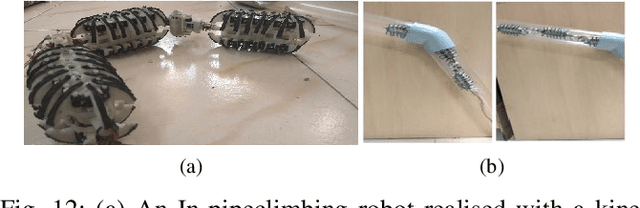
This paper presents a novel design of an Omnidirectional bendable Omnicrawler module- CObRaSO. Along with the longitudinal crawling and sideways rolling motion, the performance of the OmniCrawler is further enhanced by the introduction of Omnidirectional bending within the module, which is the key contribution of this paper. The Omnidirectional bending is achieved by an arrangement of two independent 1-DOF joints aligned at 90? w.r.t each other. The unique characteristic of this module is its ability to crawl in Omnidirectionally bent configuration which is achieved by a novel design of a 2-DOF roller chain and a backbone of a hybrid structure of a soft-rigid material. This hybrid structure provides compliant pathways for the lug-chain assembly to passively conform with the orientation of the module and crawl in Omnidirectional bent configuration, which makes this module one of its kind. Furthermore, we show that the unique modular design of CObRaSO unveils its versatility by achieving active compliance on an uneven surface, demonstrating its applications in different robotic platforms (an in-pipeline robot, Quadruped and snake robot) and exhibiting hybrid locomotion modes in various configurations of the robots. The mechanism and mobility characteristics of the proposed module have been verified with the aid of simulations and experiments on real robot prototype.