 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModular Pipe Climber
Paper and Code
Sep 23, 2019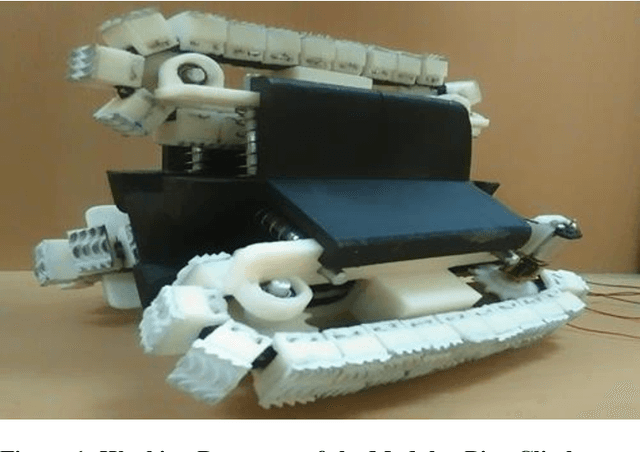
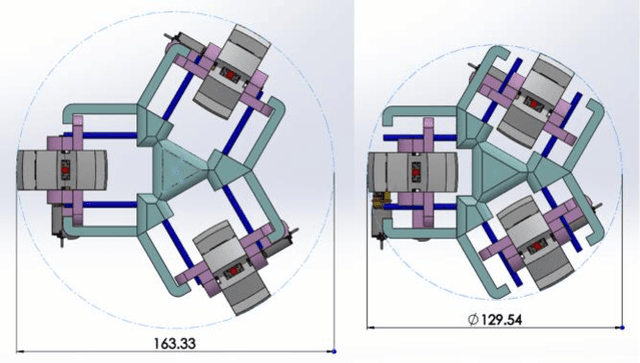
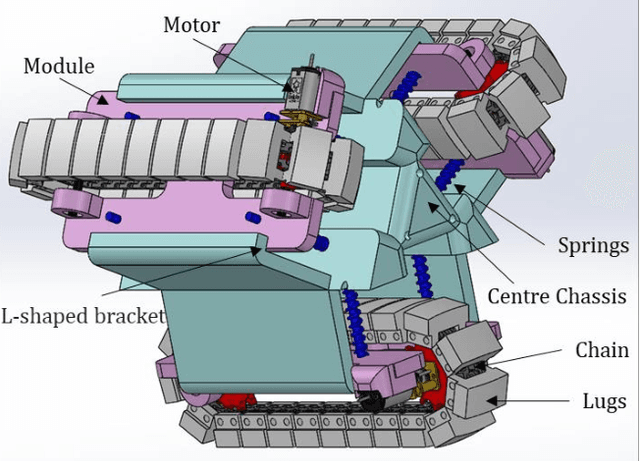
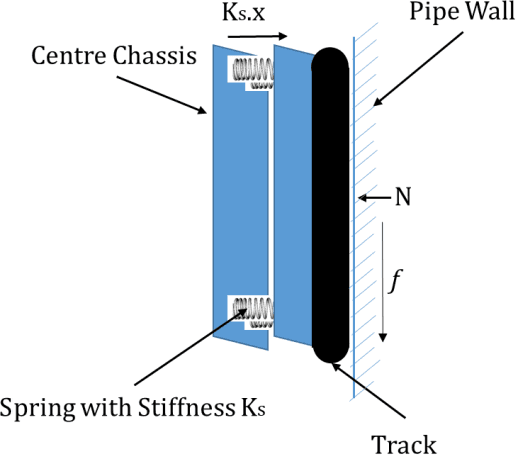
This paper discusses the design and implementation of the Modular Pipe Climber inside ASTM D1785 - 15e1 standard pipes [1]. The robot has three tracks which operate independently and are mounted on three modules which are oriented at 120{\deg} to each other. The tracks provide for greater surface traction compared to wheels [2]. The tracks are pushed onto the inner wall of the pipe by passive springs which help in maintaining the contact with the pipe during vertical climb and while turning in bends. The modules have the provision to compress asymmetrically, which helps the robot to take turns in bends in all directions. The motor torque required by the robot and the desired spring stiffness are calculated at quasistatic and static equilibriums when the pipe climber is in a vertical climb. The springs were further simulated and analyzed in ADAMS MSC. The prototype built based on these obtained values was experimented on, in complex pipe networks. Differential speed is employed when turning in bends to improve the efficiency and reduce the stresses experienced by the robot.