 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributed Kalman filter
Papers and Code
Robust distributed extended Kalman filter based on adaptive multi-kernel mixture maximum correntropy for non-Gaussian systems
Jan 17, 2026As one of the most advanced variants in the correntropy family, the multi-kernel correntropy criterion demonstrates superior accuracy in handling non-Gaussian noise, particularly with multimodal distributions. However, current approaches suffer from key limitations-namely, reliance on a single type of sensitive Gaussian kernel and the manual selection of free parameters. To address these issues and further boost robustness, this paper introduces the concept of multi-kernel mixture correntropy (MKMC), along with its key properties. MKMC employs a flexible kernel function composed of a mixture of two Students t-Cauchy functions with adjustable (non-zero) means. Building on this criterion within multi-sensor networks, we propose a robust distributed extended Kalman filter-AMKMMC-RDEKF based on adaptive multi-kernel mixture maximum correntropy. To reduce communication overhead, a consensus averaging strategy is incorporated. Furthermore, an adaptive mechanism is introduced to mitigate the impact of manually tuned free parameters. At the same time, the computational complexity and convergence ability of the proposed algorithm are analyzed. The effectiveness of the proposed algorithm is validated through challenging scenarios involving power system and land vehicle state estimation.
Conditional Normalizing Flows for Forward and Backward Joint State and Parameter Estimation
Jan 11, 2026Traditional filtering algorithms for state estimation -- such as classical Kalman filtering, unscented Kalman filtering, and particle filters - show performance degradation when applied to nonlinear systems whose uncertainty follows arbitrary non-Gaussian, and potentially multi-modal distributions. This study reviews recent approaches to state estimation via nonlinear filtering based on conditional normalizing flows, where the conditional embedding is generated by standard MLP architectures, transformers or selective state-space models (like Mamba-SSM). In addition, we test the effectiveness of an optimal-transport-inspired kinetic loss term in mitigating overparameterization in flows consisting of a large collection of transformations. We investigate the performance of these approaches on applications relevant to autonomous driving and patient population dynamics, paying special attention to how they handle time inversion and chained predictions. Finally, we assess the performance of various conditioning strategies for an application to real-world COVID-19 joint SIR system forecasting and parameter estimation.
Pathwise Representation of the Smoothing Distribution in Continuous-Time Linear Gaussian Models
Jan 05, 2026We study the filtering and smoothing problem for continuous-time linear Gaussian systems. While classical approaches such as the Kalman-Bucy filter and the Rauch-Tung-Striebel (RTS) smoother provide recursive formulas for the conditional mean and covariance, we present a pathwise perspective that characterizes the smoothing error dynamics as an Ornstein-Uhlenbeck process. As an application, we show that standard filtering and smoothing equations can be uniformly derived as corollaries of our main theorem. In particular, we provide the first mathematically rigorous derivation of the Bryson-Frazier smoother in the continuous-time setting. Beyond offering a more transparent understanding of the smoothing distribution, our formulation enables pathwise sampling from it, which facilitates Monte Carlo methods for evaluating nonlinear functionals.
Bayesian Subspace Gradient Estimation for Zeroth-Order Optimization of Large Language Models
Jan 04, 2026Fine-tuning large language models (LLMs) with zeroth-order (ZO) optimization reduces memory by approximating gradients through function evaluations, but existing methods rely on one-step gradient estimates from random perturbations. We introduce Bayesian Subspace Zeroth-Order optimization (BSZO), a ZO optimizer that applies Kalman filtering to combine finite-difference information across multiple perturbation directions. By treating each finite-difference measurement as a noisy observation, BSZO builds a posterior distribution over the projected gradient and updates it through Bayesian inference, with a residual-based adaptive mechanism to adjust perturbation scales. Theoretical analysis shows that BSZO improves the convergence rate by a factor of $k/γ$ compared to standard ZO methods. Experiments on RoBERTa, Mistral, and OPT models show that BSZO outperforms MeZO, MeZO-Adam, and HiZOO across various tasks, achieving up to 6.67\% absolute average improvement on OPT-13B while keeping memory usage close to inference-only baselines (1.00$\times$--1.08$\times$ of MeZO).
A Spiking Neural Network Implementation of Gaussian Belief Propagation
Dec 11, 2025Bayesian inference offers a principled account of information processing in natural agents. However, it remains an open question how neural mechanisms perform their abstract operations. We investigate a hypothesis where a distributed form of Bayesian inference, namely message passing on factor graphs, is performed by a simulated network of leaky-integrate-and-fire neurons. Specifically, we perform Gaussian belief propagation by encoding messages that come into factor nodes as spike-based signals, propagating these signals through a spiking neural network (SNN) and decoding the spike-based signal back to an outgoing message. Three core linear operations, equality (branching), addition, and multiplication, are realized in networks of leaky integrate-and-fire models. Validation against the standard sum-product algorithm shows accurate message updates, while applications to Kalman filtering and Bayesian linear regression demonstrate the framework's potential for both static and dynamic inference tasks. Our results provide a step toward biologically grounded, neuromorphic implementations of probabilistic reasoning.
Logarithmic Regret and Polynomial Scaling in Online Multi-step-ahead Prediction
Nov 16, 2025This letter studies the problem of online multi-step-ahead prediction for unknown linear stochastic systems. Using conditional distribution theory, we derive an optimal parameterization of the prediction policy as a linear function of future inputs, past inputs, and past outputs. Based on this characterization, we propose an online least-squares algorithm to learn the policy and analyze its regret relative to the optimal model-based predictor. We show that the online algorithm achieves logarithmic regret with respect to the optimal Kalman filter in the multi-step setting. Furthermore, with new proof techniques, we establish an almost-sure regret bound that does not rely on fixed failure probabilities for sufficiently large horizons $N$. Finally, our analysis also reveals that, while the regret remains logarithmic in $N$, its constant factor grows polynomially with the prediction horizon $H$, with the polynomial order set by the largest Jordan block of eigenvalue 1 in the system matrix.
Privacy protection under the exposure of systems' prior information
Nov 13, 2025

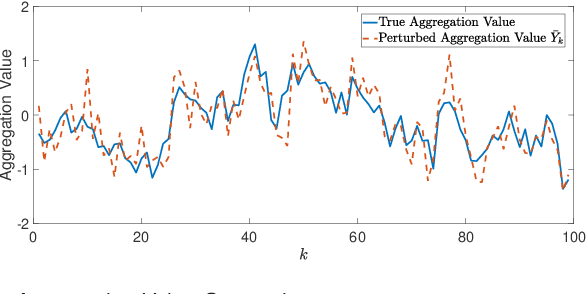
For systems whose states implicate sensitive information, their privacy is of great concern. While notions like differential privacy have been successfully introduced to dynamical systems, it is still unclear how a system's privacy can be properly protected when facing the challenging yet frequently-encountered scenario where an adversary possesses prior knowledge, e.g., the steady state, of the system. This paper presents a new systematic approach to protect the privacy of a discrete-time linear time-invariant system against adversaries knowledgeable of the system's prior information. We employ a tailored \emph{pointwise maximal leakage (PML) privacy} criterion. PML characterizes the worst-case privacy performance, which is sharply different from that of the better-known mutual-information privacy. We derive necessary and sufficient conditions for PML privacy and construct tractable design procedures. Furthermore, our analysis leads to insight into how PML privacy, differential privacy, and mutual-information privacy are related. We then revisit Kalman filters from the perspective of PML privacy and derive a lower bound on the steady-state estimation-error covariance in terms of the PML parameters. Finally, the derived results are illustrated in a case study of privacy protection for distributed sensing in smart buildings.
SVN-ICP: Uncertainty Estimation of ICP-based LiDAR Odometry using Stein Variational Newton
Sep 09, 2025This letter introduces SVN-ICP, a novel Iterative Closest Point (ICP) algorithm with uncertainty estimation that leverages Stein Variational Newton (SVN) on manifold. Designed specifically for fusing LiDAR odometry in multisensor systems, the proposed method ensures accurate pose estimation and consistent noise parameter inference, even in LiDAR-degraded environments. By approximating the posterior distribution using particles within the Stein Variational Inference framework, SVN-ICP eliminates the need for explicit noise modeling or manual parameter tuning. To evaluate its effectiveness, we integrate SVN-ICP into a simple error-state Kalman filter alongside an IMU and test it across multiple datasets spanning diverse environments and robot types. Extensive experimental results demonstrate that our approach outperforms best-in-class methods on challenging scenarios while providing reliable uncertainty estimates.
Cooperative Circumnavigation for Multi-Quadrotor Systems via Onboard Sensing
Jun 26, 2025A cooperative circumnavigation framework is proposed for multi-quadrotor systems to enclose and track a moving target without reliance on external localization systems. The distinct relationships between quadrotor-quadrotor and quadrotor-target interactions are evaluated using a heterogeneous perception strategy and corresponding state estimation algorithms. A modified Kalman filter is developed to fuse visual-inertial odometry with range measurements to enhance the accuracy of inter-quadrotor relative localization. An event-triggered distributed Kalman filter is designed to achieve robust target state estimation under visual occlusion by incorporating neighbor measurements and estimated inter-quadrotor relative positions. Using the estimation results, a cooperative circumnavigation controller is constructed, leveraging an oscillator-based autonomous formation flight strategy. We conduct extensive indoor and outdoor experiments to validate the efficiency of the proposed circumnavigation framework in occluded environments. Furthermore, a quadrotor failure experiment highlights the inherent fault tolerance property of the proposed framework, underscoring its potential for deployment in search-and-rescue operations.
Distributed Kalman Filter with Ultimately Accurate Fused Measurement Covariance
Apr 11, 2025This paper investigates the distributed Kalman filter (DKF) for linear systems, with specific attention on measurement fusion, which is a typical way of information sharing and is vital for enhancing stability and improving estimation accuracy. We show that it is the mismatch between the fused measurement and the fused covariance that leads to performance degradation or inconsistency in previous consensus-based DKF algorithms. To address this issue, we introduce two fully distributed approaches for calculating the exact covariance of the fused measurements, building upon which the modified DKF algorithms are proposed. Moreover, the performance analysis of the modified algorithms is also provided under rather mild conditions, including the steady-state value of the estimation error covariance. We also show that due to the guaranteed consistency in the modified DKF algorithms, the steady-state estimation accuracy is significantly improved compared to classical DKF algorithms. Numerical experiments are carried out to validate the theoretical analysis and show the advantages of the proposed methods.