 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCooperative Circumnavigation for Multiple Unmanned Surface Vehicles Without External Localization
Jun 03, 2026This paper proposes a cooperative target circumnavigation framework for multiple unmanned surface vehicles (USVs) operating without external localization. The objective is to maintain a uniform circular formation of a specified radius around a target using only limited onboard sensing. The framework adopts a heterogeneous perception strategy that distinguishes between the asymmetric sensing relationships with the target and among the USVs. Specifically, the USVs obtain relative range and displacement measurements through active perception and inter-vehicle communication, while bearing measurements to a non-cooperative target are acquired via passive sensors. To estimate relative positions--both among USVs and between each USV and the target--we employ a Maximum Correntropy Kalman Filter and a Pseudo-Linear Kalman Filter, respectively. A coupled oscillator-based formation controller is designed to ensure system observability while achieving circumnavigation. Theoretical analysis demonstrates that the controller ensures the relative motions between the USVs, as well as that between each USV and the target, satisfy the persistent excitation condition, thereby guaranteeing observability of the Kalman-based filters. The effectiveness of the proposed approach is validated through numerical simulations.
Cooperative Circumnavigation for Multi-Quadrotor Systems via Onboard Sensing
Jun 26, 2025A cooperative circumnavigation framework is proposed for multi-quadrotor systems to enclose and track a moving target without reliance on external localization systems. The distinct relationships between quadrotor-quadrotor and quadrotor-target interactions are evaluated using a heterogeneous perception strategy and corresponding state estimation algorithms. A modified Kalman filter is developed to fuse visual-inertial odometry with range measurements to enhance the accuracy of inter-quadrotor relative localization. An event-triggered distributed Kalman filter is designed to achieve robust target state estimation under visual occlusion by incorporating neighbor measurements and estimated inter-quadrotor relative positions. Using the estimation results, a cooperative circumnavigation controller is constructed, leveraging an oscillator-based autonomous formation flight strategy. We conduct extensive indoor and outdoor experiments to validate the efficiency of the proposed circumnavigation framework in occluded environments. Furthermore, a quadrotor failure experiment highlights the inherent fault tolerance property of the proposed framework, underscoring its potential for deployment in search-and-rescue operations.
Hybrid Classification-Regression Adaptive Loss for Dense Object Detection
Aug 30, 2024



For object detection detectors, enhancing model performance hinges on the ability to simultaneously consider inconsistencies across tasks and focus on difficult-to-train samples. Achieving this necessitates incorporating information from both the classification and regression tasks. However, prior work tends to either emphasize difficult-to-train samples within their respective tasks or simply compute classification scores with IoU, often leading to suboptimal model performance. In this paper, we propose a Hybrid Classification-Regression Adaptive Loss, termed as HCRAL. Specifically, we introduce the Residual of Classification and IoU (RCI) module for cross-task supervision, addressing task inconsistencies, and the Conditioning Factor (CF) to focus on difficult-to-train samples within each task. Furthermore, we introduce a new strategy named Expanded Adaptive Training Sample Selection (EATSS) to provide additional samples that exhibit classification and regression inconsistencies. To validate the effectiveness of the proposed method, we conduct extensive experiments on COCO test-dev. Experimental evaluations demonstrate the superiority of our approachs. Additionally, we designed experiments by separately combining the classification and regression loss with regular loss functions in popular one-stage models, demonstrating improved performance.
Formation Control for Moving Target Enclosing via Relative Localization
Jul 28, 2023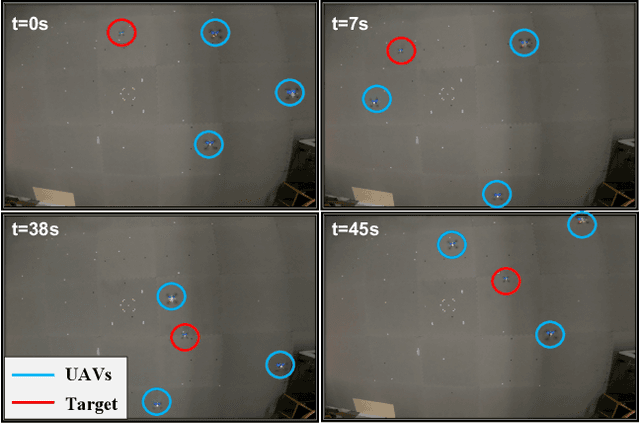
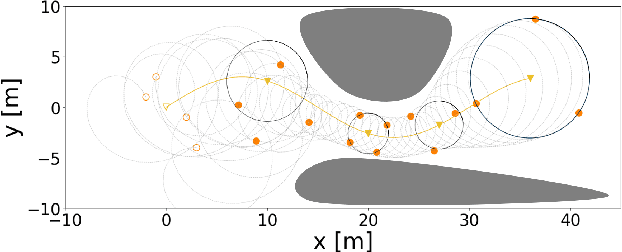
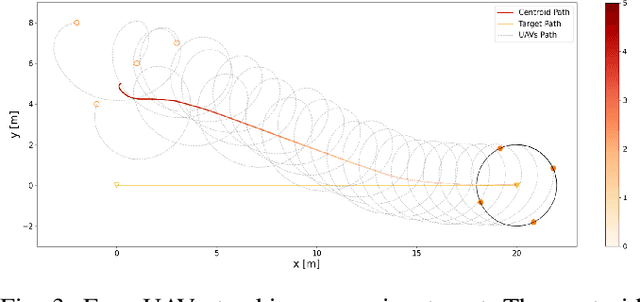
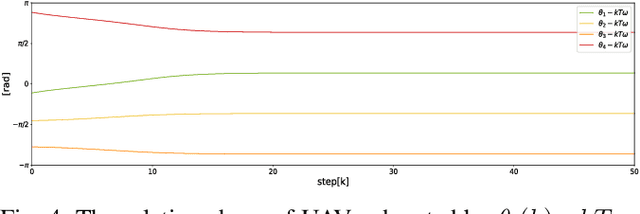
In this paper, we investigate the problem of controlling multiple unmanned aerial vehicles (UAVs) to enclose a moving target in a distributed fashion based on a relative distance and self-displacement measurements. A relative localization technique is developed based on the recursive least square estimation (RLSE) technique with a forgetting factor to estimates both the ``UAV-UAV'' and ``UAV-target'' relative positions. The formation enclosing motion is planned using a coupled oscillator model, which generates desired motion for UAVs to distribute evenly on a circle. The coupled-oscillator-based motion can also facilitate the exponential convergence of relative localization due to its persistent excitation nature. Based on the generation strategy of desired formation pattern and relative localization estimates, a cooperative formation tracking control scheme is proposed, which enables the formation geometric center to asymptotically converge to the moving target. The asymptotic convergence performance is analyzed theoretically for both the relative localization technique and the formation control algorithm. Numerical simulations are provided to show the efficiency of the proposed algorithm. Experiments with three quadrotors tracking one target are conducted to evaluate the proposed target enclosing method in real platforms.
Network resilience
Jul 26, 2020
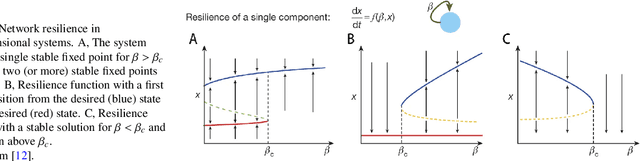
Many systems on our planet are known to shift abruptly and irreversibly from one state to another when they are forced across a "tipping point," such as mass extinctions in ecological networks, cascading failures in infrastructure systems, and social convention changes in human and animal networks. Such a regime shift demonstrates a system's resilience that characterizes the ability of a system to adjust its activity to retain its basic functionality in the face of internal disturbances or external environmental changes. In the past 50 years, attention was almost exclusively given to low dimensional systems and calibration of their resilience functions and indicators of early warning signals without considerations for the interactions between the components. Only in recent years, taking advantages of the network theory and lavish real data sets, network scientists have directed their interest to the real-world complex networked multidimensional systems and their resilience function and early warning indicators. This report is devoted to a comprehensive review of resilience function and regime shift of complex systems in different domains, such as ecology, biology, social systems and infrastructure. We cover the related research about empirical observations, experimental studies, mathematical modeling, and theoretical analysis. We also discuss some ambiguous definitions, such as robustness, resilience, and stability.