 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn Predictability of Reinforcement Learning Dynamics for Large Language Models
Oct 02, 2025Recent advances in reasoning capabilities of large language models (LLMs) are largely driven by reinforcement learning (RL), yet the underlying parameter dynamics during RL training remain poorly understood. This work identifies two fundamental properties of RL-induced parameter updates in LLMs: (1) Rank-1 Dominance, where the top singular subspace of the parameter update matrix nearly fully determines reasoning improvements, recovering over 99\% of performance gains; and (2) Rank-1 Linear Dynamics, where this dominant subspace evolves linearly throughout training, enabling accurate prediction from early checkpoints. Extensive experiments across 8 LLMs and 7 algorithms validate the generalizability of these properties. More importantly, based on these findings, we propose AlphaRL, a plug-in acceleration framework that extrapolates the final parameter update using a short early training window, achieving up to 2.5 speedup while retaining \textgreater 96\% of reasoning performance without extra modules or hyperparameter tuning. This positions our finding as a versatile and practical tool for large-scale RL, opening a path toward principled, interpretable, and efficient training paradigm for LLMs.
SelfAug: Mitigating Catastrophic Forgetting in Retrieval-Augmented Generation via Distribution Self-Alignment
Sep 04, 2025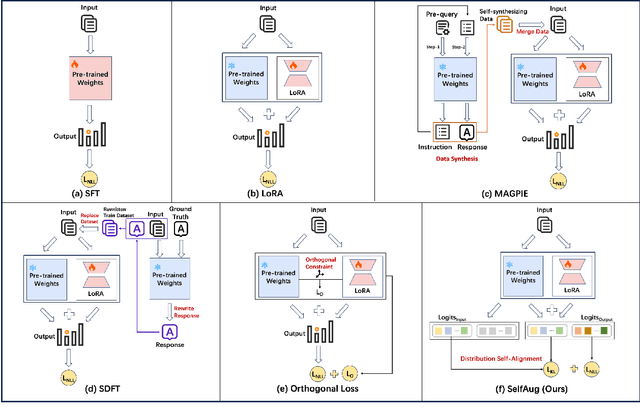
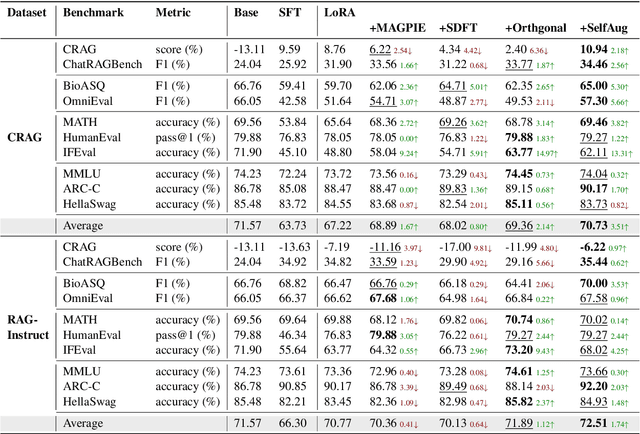
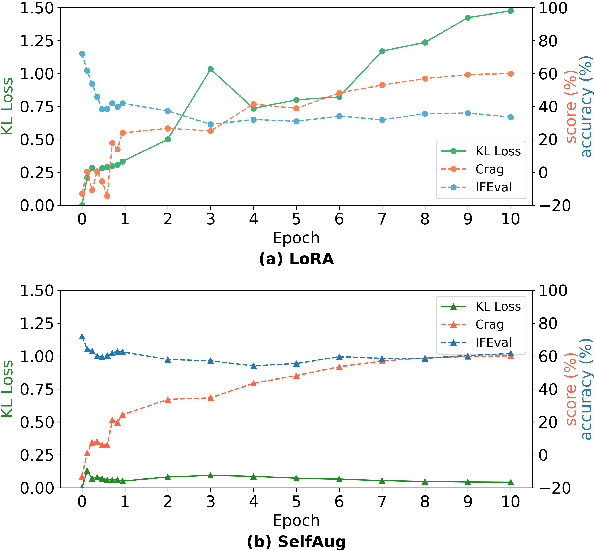
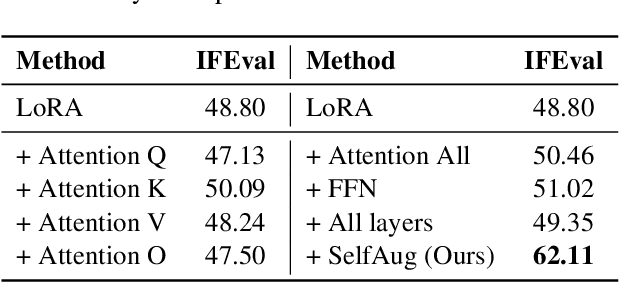
Recent advancements in large language models (LLMs) have revolutionized natural language processing through their remarkable capabilities in understanding and executing diverse tasks. While supervised fine-tuning, particularly in Retrieval-Augmented Generation (RAG) scenarios, effectively enhances task-specific performance, it often leads to catastrophic forgetting, where models lose their previously acquired knowledge and general capabilities. Existing solutions either require access to general instruction data or face limitations in preserving the model's original distribution. To overcome these limitations, we propose SelfAug, a self-distribution alignment method that aligns input sequence logits to preserve the model's semantic distribution, thereby mitigating catastrophic forgetting and improving downstream performance. Extensive experiments demonstrate that SelfAug achieves a superior balance between downstream learning and general capability retention. Our comprehensive empirical analysis reveals a direct correlation between distribution shifts and the severity of catastrophic forgetting in RAG scenarios, highlighting how the absence of RAG capabilities in general instruction tuning leads to significant distribution shifts during fine-tuning. Our findings not only advance the understanding of catastrophic forgetting in RAG contexts but also provide a practical solution applicable across diverse fine-tuning scenarios. Our code is publicly available at https://github.com/USTC-StarTeam/SelfAug.
Deep Learning within Tabular Data: Foundations, Challenges, Advances and Future Directions
Jan 07, 2025Tabular data remains one of the most prevalent data types across a wide range of real-world applications, yet effective representation learning for this domain poses unique challenges due to its irregular patterns, heterogeneous feature distributions, and complex inter-column dependencies. This survey provides a comprehensive review of state-of-the-art techniques in tabular data representation learning, structured around three foundational design elements: training data, neural architectures, and learning objectives. Unlike prior surveys that focus primarily on either architecture design or learning strategies, we adopt a holistic perspective that emphasizes the universality and robustness of representation learning methods across diverse downstream tasks. We examine recent advances in data augmentation and generation, specialized neural network architectures tailored to tabular data, and innovative learning objectives that enhance representation quality. Additionally, we highlight the growing influence of self-supervised learning and the adaptation of transformer-based foundation models for tabular data. Our review is based on a systematic literature search using rigorous inclusion criteria, encompassing 127 papers published since 2020 in top-tier conferences and journals. Through detailed analysis and comparison, we identify emerging trends, critical gaps, and promising directions for future research, aiming to guide the development of more generalizable and effective tabular data representation methods.
Predicting Stroke through Retinal Graphs and Multimodal Self-supervised Learning
Nov 08, 2024



Early identification of stroke is crucial for intervention, requiring reliable models. We proposed an efficient retinal image representation together with clinical information to capture a comprehensive overview of cardiovascular health, leveraging large multimodal datasets for new medical insights. Our approach is one of the first contrastive frameworks that integrates graph and tabular data, using vessel graphs derived from retinal images for efficient representation. This method, combined with multimodal contrastive learning, significantly enhances stroke prediction accuracy by integrating data from multiple sources and using contrastive learning for transfer learning. The self-supervised learning techniques employed allow the model to learn effectively from unlabeled data, reducing the dependency on large annotated datasets. Our framework showed an AUROC improvement of 3.78% from supervised to self-supervised approaches. Additionally, the graph-level representation approach achieved superior performance to image encoders while significantly reducing pre-training and fine-tuning runtimes. These findings indicate that retinal images are a cost-effective method for improving cardiovascular disease predictions and pave the way for future research into retinal and cerebral vessel connections and the use of graph-based retinal vessel representations.
ChemEval: A Comprehensive Multi-Level Chemical Evaluation for Large Language Models
Sep 21, 2024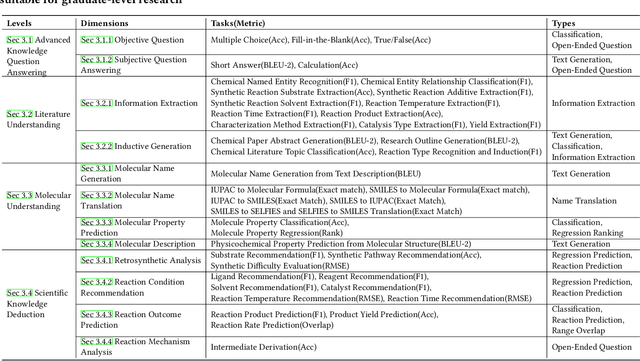
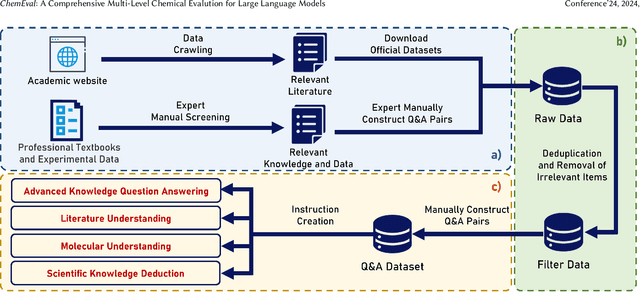


There is a growing interest in the role that LLMs play in chemistry which lead to an increased focus on the development of LLMs benchmarks tailored to chemical domains to assess the performance of LLMs across a spectrum of chemical tasks varying in type and complexity. However, existing benchmarks in this domain fail to adequately meet the specific requirements of chemical research professionals. To this end, we propose \textbf{\textit{ChemEval}}, which provides a comprehensive assessment of the capabilities of LLMs across a wide range of chemical domain tasks. Specifically, ChemEval identified 4 crucial progressive levels in chemistry, assessing 12 dimensions of LLMs across 42 distinct chemical tasks which are informed by open-source data and the data meticulously crafted by chemical experts, ensuring that the tasks have practical value and can effectively evaluate the capabilities of LLMs. In the experiment, we evaluate 12 mainstream LLMs on ChemEval under zero-shot and few-shot learning contexts, which included carefully selected demonstration examples and carefully designed prompts. The results show that while general LLMs like GPT-4 and Claude-3.5 excel in literature understanding and instruction following, they fall short in tasks demanding advanced chemical knowledge. Conversely, specialized LLMs exhibit enhanced chemical competencies, albeit with reduced literary comprehension. This suggests that LLMs have significant potential for enhancement when tackling sophisticated tasks in the field of chemistry. We believe our work will facilitate the exploration of their potential to drive progress in chemistry. Our benchmark and analysis will be available at {\color{blue} \url{https://github.com/USTC-StarTeam/ChemEval}}.
RTracker: Recoverable Tracking via PN Tree Structured Memory
Mar 28, 2024



Existing tracking methods mainly focus on learning better target representation or developing more robust prediction models to improve tracking performance. While tracking performance has significantly improved, the target loss issue occurs frequently due to tracking failures, complete occlusion, or out-of-view situations. However, considerably less attention is paid to the self-recovery issue of tracking methods, which is crucial for practical applications. To this end, we propose a recoverable tracking framework, RTracker, that uses a tree-structured memory to dynamically associate a tracker and a detector to enable self-recovery ability. Specifically, we propose a Positive-Negative Tree-structured memory to chronologically store and maintain positive and negative target samples. Upon the PN tree memory, we develop corresponding walking rules for determining the state of the target and define a set of control flows to unite the tracker and the detector in different tracking scenarios. Our core idea is to use the support samples of positive and negative target categories to establish a relative distance-based criterion for a reliable assessment of target loss. The favorable performance in comparison against the state-of-the-art methods on numerous challenging benchmarks demonstrates the effectiveness of the proposed algorithm.
Non-Uniform Sampling Reconstruction for Symmetrical NMR Spectroscopy by Exploiting Inherent Symmetry
Sep 24, 2023



Symmetrical NMR spectroscopy constitutes a vital branch of multidimensional NMR spectroscopy, providing a powerful tool for the structural elucidation of biological macromolecules. Non-Uniform Sampling (NUS) serves as an effective strategy for averting the prohibitive acquisition time of multidimensional NMR spectroscopy by only sampling a few points according to NUS sampling schedules and reconstructing missing points via algorithms. However, current sampling schedules are unable to maintain the accurate recovery of cross peaks that are weak but important. In this work, we propose a novel sampling schedule termed as SCPG (Symmetrical Copy Poisson Gap) and employ CS (Compressed Sensing) methods for reconstruction. We theoretically prove that the symmetrical constraint, apart from sparsity, is implicitly implemented when SCPG is combined with CS methods. The simulated and experimental data substantiate the advantage of SCPG over state-of-the-art 2D Woven PG in the NUS reconstruction of symmetrical NMR spectroscopy.
Cross-Modality Proposal-guided Feature Mining for Unregistered RGB-Thermal Pedestrian Detection
Aug 23, 2023RGB-Thermal (RGB-T) pedestrian detection aims to locate the pedestrians in RGB-T image pairs to exploit the complementation between the two modalities for improving detection robustness in extreme conditions. Most existing algorithms assume that the RGB-T image pairs are well registered, while in the real world they are not aligned ideally due to parallax or different field-of-view of the cameras. The pedestrians in misaligned image pairs may locate at different positions in two images, which results in two challenges: 1) how to achieve inter-modality complementation using spatially misaligned RGB-T pedestrian patches, and 2) how to recognize the unpaired pedestrians at the boundary. To deal with these issues, we propose a new paradigm for unregistered RGB-T pedestrian detection, which predicts two separate pedestrian locations in the RGB and thermal images, respectively. Specifically, we propose a cross-modality proposal-guided feature mining (CPFM) mechanism to extract the two precise fusion features for representing the pedestrian in the two modalities, even if the RGB-T image pair is unaligned. It enables us to effectively exploit the complementation between the two modalities. With the CPFM mechanism, we build a two-stream dense detector; it predicts the two pedestrian locations in the two modalities based on the corresponding fusion feature mined by the CPFM mechanism. Besides, we design a data augmentation method, named Homography, to simulate the discrepancy in scales and views between images. We also investigate two non-maximum suppression (NMS) methods for post-processing. Favorable experimental results demonstrate the effectiveness and robustness of our method in dealing with unregistered pedestrians with different shifts.
CiteTracker: Correlating Image and Text for Visual Tracking
Aug 22, 2023



Existing visual tracking methods typically take an image patch as the reference of the target to perform tracking. However, a single image patch cannot provide a complete and precise concept of the target object as images are limited in their ability to abstract and can be ambiguous, which makes it difficult to track targets with drastic variations. In this paper, we propose the CiteTracker to enhance target modeling and inference in visual tracking by connecting images and text. Specifically, we develop a text generation module to convert the target image patch into a descriptive text containing its class and attribute information, providing a comprehensive reference point for the target. In addition, a dynamic description module is designed to adapt to target variations for more effective target representation. We then associate the target description and the search image using an attention-based correlation module to generate the correlated features for target state reference. Extensive experiments on five diverse datasets are conducted to evaluate the proposed algorithm and the favorable performance against the state-of-the-art methods demonstrates the effectiveness of the proposed tracking method.