 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Empirical Study of SFT-DPO Interaction and Parameterization in Small Language Models
Mar 20, 2026Direct Preference Optimization (DPO) is widely used after supervised fine-tuning (SFT) to align language models, yet empirical behavior under small backbones and modest data is under-specified. We systematically compare SFT-only, DPO-only, and staged SFT-to-DPO training alongside full fine-tuning (FFT) versus LoRA on a GPT-2-scale decoder, evaluating paraphrase detection and Shakespearean sonnet continuation. DPO yields small, task-dependent gains over strong SFT and can match competitive SFT accuracy without a warm start when the preference construction closely parallels the supervised objective. In contrast, parameterization dominates: FFT consistently outperforms LoRA at matched training depth, and LoRA does not reduce wall-clock time on our hardware. These findings indicate that, in this small-scale regime, supervised full-parameter adaptation remains the primary performance lever, while preference optimization and low-rank adaptation provide limited marginal returns.
SUMFORU: An LLM-Based Review Summarization Framework for Personalized Purchase Decision Support
Dec 12, 2025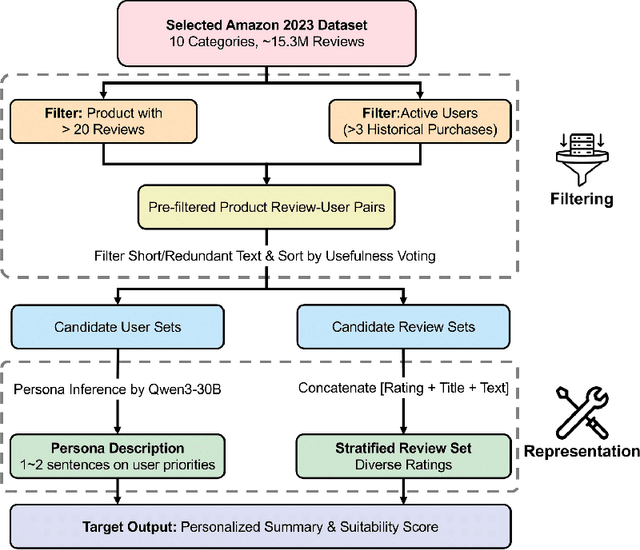
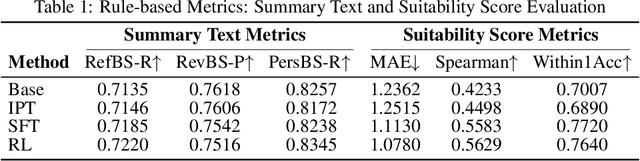
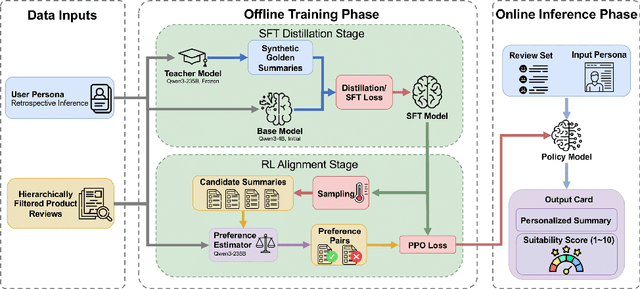
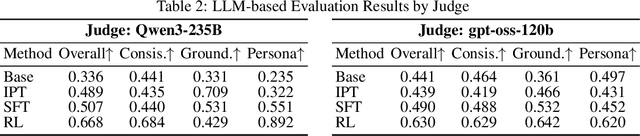
Online product reviews contain rich but noisy signals that overwhelm users and hinder effective decision-making. Existing LLM-based summarizers remain generic and fail to account for individual preferences, limiting their practical utility. We propose SUMFORU, a steerable review summarization framework that aligns outputs with explicit user personas to support personalized purchase decisions. Our approach integrates a high-quality data pipeline built from the Amazon 2023 Review Dataset with a two-stage alignment procedure: (1) persona-aware Supervised Fine-Tuning (SFT) via asymmetric knowledge distillation, and (2) Reinforcement Learning with AI Feedback (RLAIF) using a preference estimator to capture fine-grained, persona-relevant signals. We evaluate the model across rule-based, LLM-based, and human-centered metrics, demonstrating consistent improvements in consistency, grounding, and preference alignment. Our framework achieves the highest performance across all evaluation settings and generalizes effectively to unseen product categories. Our results highlight the promise of steerable pluralistic alignment for building next-generation personalized decision-support systems.
NoveltyRank: Estimating Conceptual Novelty of AI Papers
Dec 12, 2025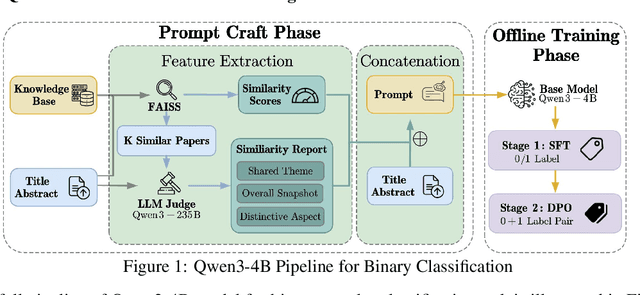
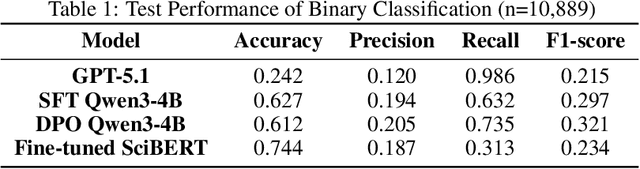
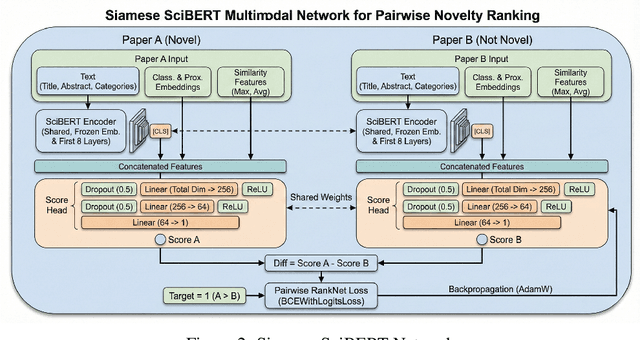

With the growing ease of academic publishing, the volume of research papers, especially in AI-related fields, has surged dramatically. This flood of publications makes it difficult for truly novel and impactful work to stand out, and manual novelty assessment is often unstable and time-consuming. Our project aims to develop a model that estimates and ranks the conceptual novelty of AI papers, enabling a data-driven and scalable assessment of research originality. Such a system can help researchers efficiently identify submissions that introduce genuinely innovative ideas rather than minor variants, and provide conference reviewers with a quantitative and consistent signal of novelty. Our approach evaluates novelty primarily through a paper's title, abstract, and semantic similarity to prior literature. Given the motivation of novelty estimation, we explore two task formulations with different modeling objectives, each offering a different perspective: (1) binary classification, which predicts the paper's absolute novelty from learned patterns of prior novel works, and (2) pairwise novelty comparison, which learns to distinguish papers by relative novelty over others. We fine-tune Qwen3-4B-Instruct-2507 and SciBERT on both tasks, benchmarking against GPT-5.1 to analyze how task formulation and modeling choices affect performance. The implementation is publicly available at https://github.com/ZhengxuYan/NoveltyRank.
MotionWavelet: Human Motion Prediction via Wavelet Manifold Learning
Nov 25, 2024Modeling temporal characteristics and the non-stationary dynamics of body movement plays a significant role in predicting human future motions. However, it is challenging to capture these features due to the subtle transitions involved in the complex human motions. This paper introduces MotionWavelet, a human motion prediction framework that utilizes Wavelet Transformation and studies human motion patterns in the spatial-frequency domain. In MotionWavelet, a Wavelet Diffusion Model (WDM) learns a Wavelet Manifold by applying Wavelet Transformation on the motion data therefore encoding the intricate spatial and temporal motion patterns. Once the Wavelet Manifold is built, WDM trains a diffusion model to generate human motions from Wavelet latent vectors. In addition to the WDM, MotionWavelet also presents a Wavelet Space Shaping Guidance mechanism to refine the denoising process to improve conformity with the manifold structure. WDM also develops Temporal Attention-Based Guidance to enhance prediction accuracy. Extensive experiments validate the effectiveness of MotionWavelet, demonstrating improved prediction accuracy and enhanced generalization across various benchmarks. Our code and models will be released upon acceptance.
Learning Multi-Agent Loco-Manipulation for Long-Horizon Quadrupedal Pushing
Nov 14, 2024Recently, quadrupedal locomotion has achieved significant success, but their manipulation capabilities, particularly in handling large objects, remain limited, restricting their usefulness in demanding real-world applications such as search and rescue, construction, industrial automation, and room organization. This paper tackles the task of obstacle-aware, long-horizon pushing by multiple quadrupedal robots. We propose a hierarchical multi-agent reinforcement learning framework with three levels of control. The high-level controller integrates an RRT planner and a centralized adaptive policy to generate subgoals, while the mid-level controller uses a decentralized goal-conditioned policy to guide the robots toward these sub-goals. A pre-trained low-level locomotion policy executes the movement commands. We evaluate our method against several baselines in simulation, demonstrating significant improvements over baseline approaches, with 36.0% higher success rates and 24.5% reduction in completion time than the best baseline. Our framework successfully enables long-horizon, obstacle-aware manipulation tasks like Push-Cuboid and Push-T on Go1 robots in the real world.
Collaborative Planar Pushing of Polytopic Objects with Multiple Robots in Complex Scenes
May 13, 2024Pushing is a simple yet effective skill for robots to interact with and further change the environment. Related work has been mostly focused on utilizing it as a non-prehensile manipulation primitive for a robotic manipulator. However, it can also be beneficial for low-cost mobile robots that are not equipped with a manipulator. This work tackles the general problem of controlling a team of mobile robots to push collaboratively polytopic objects within complex obstacle-cluttered environments. It incorporates several characteristic challenges for contact-rich tasks such as the hybrid switching among different contact modes and under-actuation due to constrained contact forces. The proposed method is based on hybrid optimization over a sequence of possible modes and the associated pushing forces, where (i) a set of sufficient modes is generated with a multi-directional feasibility estimation, based on quasi-static analyses for general objects and any number of robots; (ii) a hierarchical hybrid search algorithm is designed to iteratively decompose the navigation path via arch segments and select the optimal parameterized mode; and (iii) a nonlinear model predictive controller is proposed to track the desired pushing velocities adaptively online for each robot. The proposed framework is complete under mild assumptions. Its efficiency and effectiveness are validated in high-fidelity simulations and hardware experiments. Robustness to motion and actuation uncertainties is also demonstrated.