 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCollaborative Planar Pushing of Polytopic Objects with Multiple Robots in Complex Scenes
May 13, 2024Pushing is a simple yet effective skill for robots to interact with and further change the environment. Related work has been mostly focused on utilizing it as a non-prehensile manipulation primitive for a robotic manipulator. However, it can also be beneficial for low-cost mobile robots that are not equipped with a manipulator. This work tackles the general problem of controlling a team of mobile robots to push collaboratively polytopic objects within complex obstacle-cluttered environments. It incorporates several characteristic challenges for contact-rich tasks such as the hybrid switching among different contact modes and under-actuation due to constrained contact forces. The proposed method is based on hybrid optimization over a sequence of possible modes and the associated pushing forces, where (i) a set of sufficient modes is generated with a multi-directional feasibility estimation, based on quasi-static analyses for general objects and any number of robots; (ii) a hierarchical hybrid search algorithm is designed to iteratively decompose the navigation path via arch segments and select the optimal parameterized mode; and (iii) a nonlinear model predictive controller is proposed to track the desired pushing velocities adaptively online for each robot. The proposed framework is complete under mild assumptions. Its efficiency and effectiveness are validated in high-fidelity simulations and hardware experiments. Robustness to motion and actuation uncertainties is also demonstrated.
Accelerated K-Serial Stable Coalition for Dynamic Capture and Resource Defense
May 25, 2023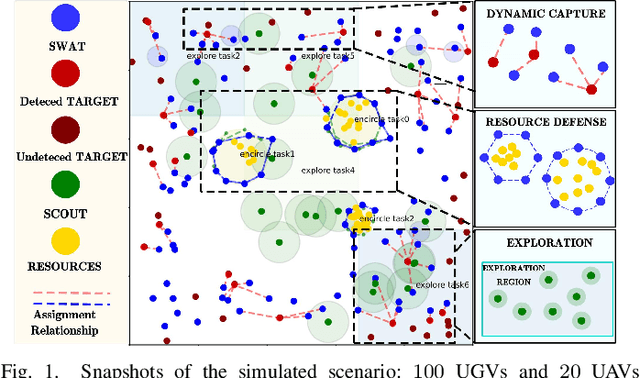
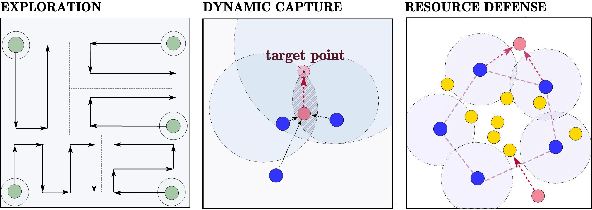
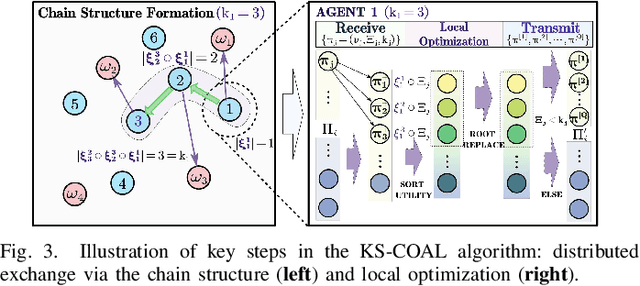
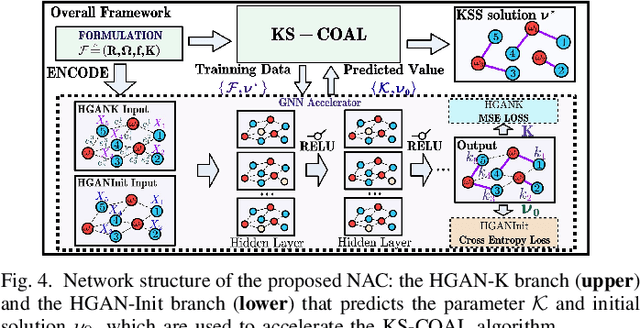
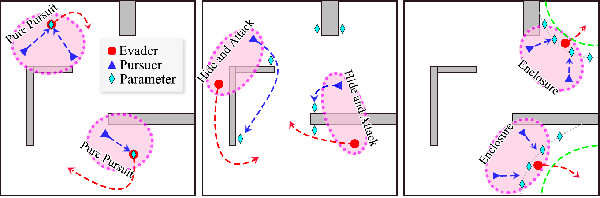
Coalition is an important mean of multi-robot systems to collaborate on common tasks. An effective and adaptive coalition strategy is essential for the online performance in dynamic and unknown environments. In this work, the problem of territory defense by large-scale heterogeneous robotic teams is considered. The tasks include surveillance, capture of dynamic targets, and perimeter defense over valuable resources. Since each robot can choose among many tasks, it remains a challenging problem to coordinate jointly these robots such that the overall utility is maximized. This work proposes a generic coalition strategy called K-serial stable coalition algorithm (KS-COAL). Different from centralized approaches, it is distributed and anytime, meaning that only local communication is required and a K-serial Nash-stable solution is ensured. Furthermore, to accelerate adaptation to dynamic targets and resource distribution that are only perceived online, a heterogeneous graph attention network (HGAN)-based heuristic is learned to select more appropriate parameters and promising initial solutions during local optimization. Compared with manual heuristics or end-to-end predictors, it is shown to both improve online adaptability and retain the quality guarantee. The proposed methods are validated rigorously via large-scale simulations with hundreds of robots, against several strong baselines including GreedyNE and FastMaxSum.
Combinatorial-hybrid Optimization for Multi-agent Systems under Collaborative Tasks
May 22, 2023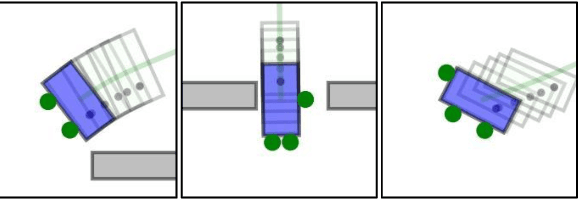
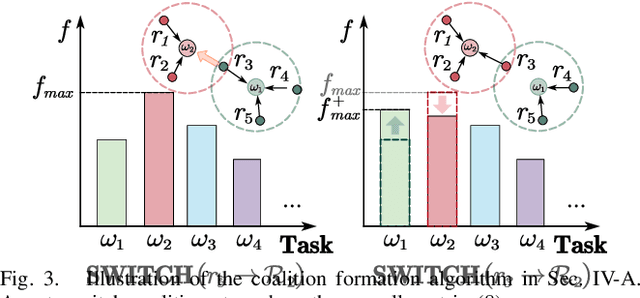

Multi-agent systems can be extremely efficient when working concurrently and collaboratively, e.g., for transportation, maintenance, search and rescue. Coordination of such teams often involves two aspects: (i) selecting appropriate sub-teams for different tasks; (ii) designing collaborative control strategies to execute these tasks. The former aspect can be combinatorial w.r.t. the team size, while the latter requires optimization over joint state-spaces under geometric and dynamic constraints. Existing work often tackles one aspect by assuming the other is given, while ignoring their close dependency. This work formulates such problems as combinatorial-hybrid optimizations (CHO), where both the discrete modes of collaboration and the continuous control parameters are optimized simultaneously and iteratively. The proposed framework consists of two interleaved layers: the dynamic formation of task coalitions and the hybrid optimization of collaborative behaviors. Overall feasibility and costs of different coalitions performing various tasks are approximated at different granularities to improve the computational efficiency. At last, a Nash-stable strategy for both task assignment and execution is derived with provable guarantee on the feasibility and quality. Two non-trivial applications of collaborative transportation and dynamic capture are studied against several baselines.