 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDisco Intelligent Omni-Surfaces: 360-degree Fully-Passive Jamming Attacks
Nov 20, 2024



Intelligent omni-surfaces (IOSs) with 360-degree electromagnetic radiation significantly improves the performance of wireless systems, while an adversarial IOS also poses a significant potential risk for physical layer security. In this paper, we propose a "DISCO" IOS (DIOS) based fully-passive jammer (FPJ) that can launch omnidirectional fully-passive jamming attacks. In the proposed DIOS-based FPJ, the interrelated refractive and reflective (R&R) coefficients of the adversarial IOS are randomly generated, acting like a "DISCO" that distributes wireless energy radiated by the base station. By introducing active channel aging (ACA) during channel coherence time, the DIOS-based FPJ can perform omnidirectional fully-passive jamming without neither jamming power nor channel knowledge of legitimate users (LUs). To characterize the impact of the DIOS-based PFJ, we derive the statistical characteristics of DIOS-jammed channels based on two widely-used IOS models, i.e., the constant-amplitude model and the variable-amplitude model. Consequently, the asymptotic analysis of the ergodic achievable sum rates under the DIOS-based omnidirectional fully-passive jamming is given based on the derived stochastic characteristics for both the two IOS models. Based on the derived analysis, the omnidirectional jamming impact of the proposed DIOS-based FPJ implemented by a constant-amplitude IOS does not depend on either the quantization number or the stochastic distribution of the DIOS coefficients, while the conclusion does not hold on when a variable-amplitude IOS is used. Numerical results based on one-bit quantization of the IOS phase shifts are provided to verify the effectiveness of the derived theoretical analysis. The proposed DIOS-based FPJ can not only launch omnidirectional fully-passive jamming, but also improve the jamming impact by about 55% at 10 dBm transmit power per LU.
DiffuserLite: Towards Real-time Diffusion Planning
Feb 02, 2024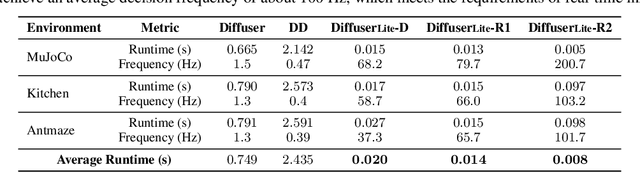
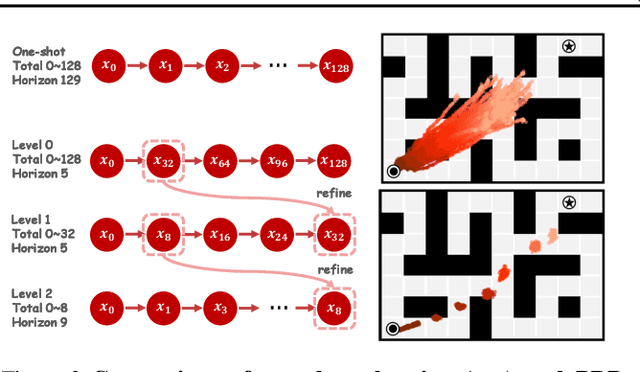
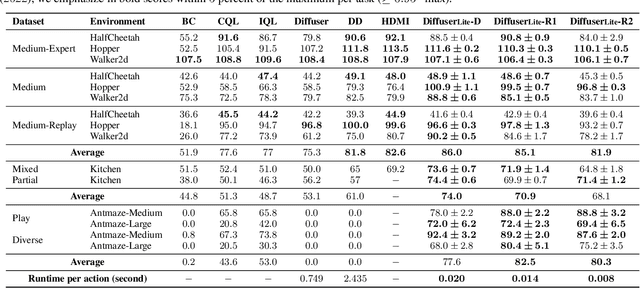
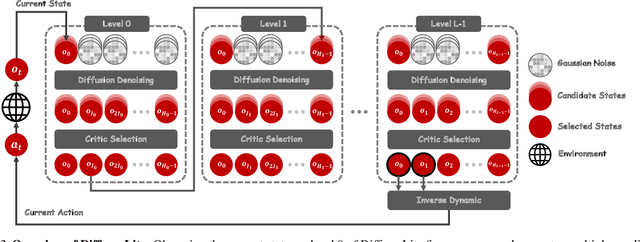
Diffusion planning has been recognized as an effective decision-making paradigm in various domains. The capability of conditionally generating high-quality long-horizon trajectories makes it a promising research direction. However, existing diffusion planning methods suffer from low decision-making frequencies due to the expensive iterative sampling cost. To address this issue, we introduce DiffuserLite, a super fast and lightweight diffusion planning framework. DiffuserLite employs a planning refinement process (PRP) to generate coarse-to-fine-grained trajectories, significantly reducing the modeling of redundant information and leading to notable increases in decision-making frequency. Our experimental results demonstrate that DiffuserLite achieves a decision-making frequency of $122$Hz ($112.7$x faster than previous mainstream frameworks) and reaches state-of-the-art performance on D4RL benchmarks. In addition, our neat DiffuserLite framework can serve as a flexible plugin to enhance decision frequency in other diffusion planning algorithms, providing a structural design reference for future works. More details and visualizations are available at https://diffuserlite.github.io/.
Research on Stable Obstacle Avoidance Control Strategy for Tracked Intelligent Transportation Vehicles in Non-structural Environment Based on Deep Learning
Jul 30, 2022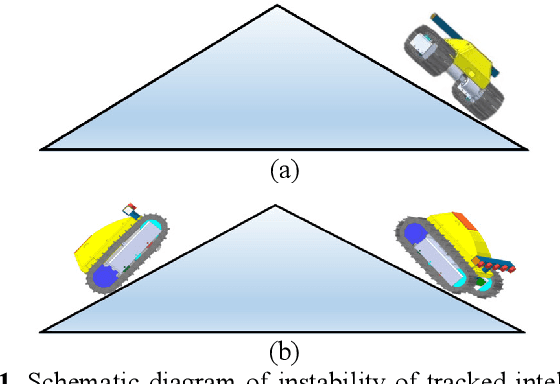
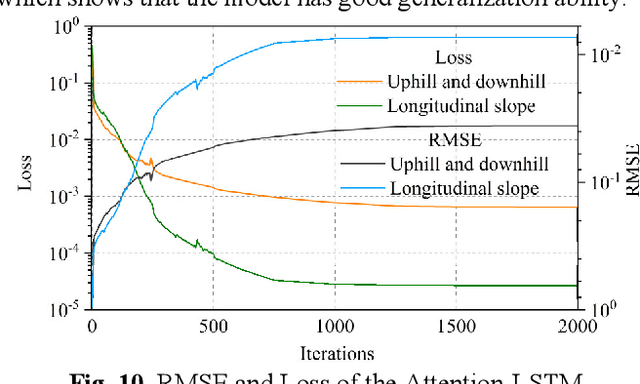
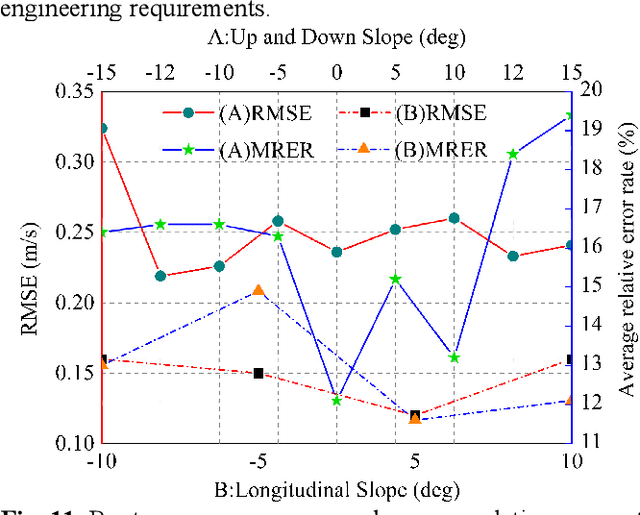
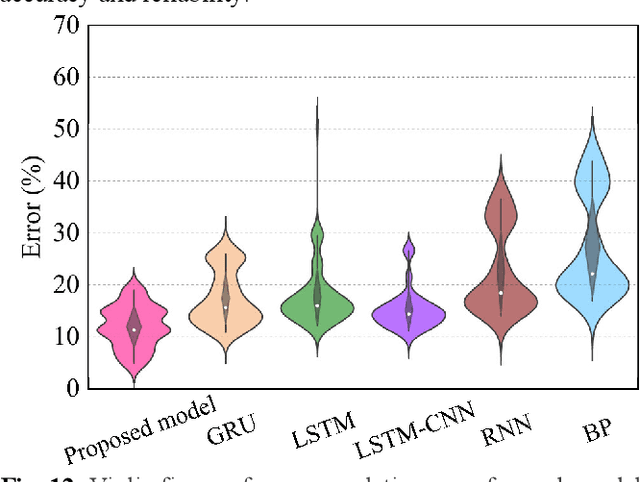
Existing intelligent driving technology often has a problem in balancing smooth driving and fast obstacle avoidance, especially when the vehicle is in a non-structural environment, and is prone to instability in emergency situations. Therefore, this study proposed an autonomous obstacle avoidance control strategy that can effectively guarantee vehicle stability based on Attention-long short-term memory (Attention-LSTM) deep learning model with the idea of humanoid driving. First, we designed the autonomous obstacle avoidance control rules to guarantee the safety of unmanned vehicles. Second, we improved the autonomous obstacle avoidance control strategy combined with the stability analysis of special vehicles. Third, we constructed a deep learning obstacle avoidance control through experiments, and the average relative error of this system was 15%. Finally, the stability and accuracy of this control strategy were verified numerically and experimentally. The method proposed in this study can ensure that the unmanned vehicle can successfully avoid the obstacles while driving smoothly.