 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiagonally-Weighted Generalized Method of Moments Estimation for Gaussian Mixture Modeling
Jul 28, 2025Since Pearson [Philosophical Transactions of the Royal Society of London. A, 185 (1894), pp. 71-110] first applied the method of moments (MM) for modeling data as a mixture of one-dimensional Gaussians, moment-based estimation methods have proliferated. Among these methods, the generalized method of moments (GMM) improves the statistical efficiency of MM by weighting the moments appropriately. However, the computational complexity and storage complexity of MM and GMM grow exponentially with the dimension, making these methods impractical for high-dimensional data or when higher-order moments are required. Such computational bottlenecks are more severe in GMM since it additionally requires estimating a large weighting matrix. To overcome these bottlenecks, we propose the diagonally-weighted GMM (DGMM), which achieves a balance among statistical efficiency, computational complexity, and numerical stability. We apply DGMM to study the parameter estimation problem for weakly separated heteroscedastic low-rank Gaussian mixtures and design a computationally efficient and numerically stable algorithm that obtains the DGMM estimator without explicitly computing or storing the moment tensors. We implement the proposed algorithm and empirically validate the advantages of DGMM: in numerical studies, DGMM attains smaller estimation errors while requiring substantially shorter runtime than MM and GMM. The code and data will be available upon publication at https://github.com/liu-lzhang/dgmm.
Neural-Inspired Advances in Integral Cryptanalysis
May 16, 2025The study by Gohr et.al at CRYPTO 2019 and sunsequent related works have shown that neural networks can uncover previously unused features, offering novel insights into cryptanalysis. Motivated by these findings, we employ neural networks to learn features specifically related to integral properties and integrate the corresponding insights into optimized search frameworks. These findings validate the framework of using neural networks for feature exploration, providing researchers with novel insights that advance established cryptanalysis methods. Neural networks have inspired the development of more precise integral search models. By comparing the integral distinguishers obtained via neural networks with those identified by classical methods, we observe that existing automated search models often fail to find optimal distinguishers. To address this issue, we develop a meet in the middle search framework that balances model accuracy and computational efficiency. As a result, we reduce the number of active plaintext bits required for an 11 rounds integral distinguisher on SKINNY64/64, and further identify a 12 rounds key dependent integral distinguisher achieving one additional round over the previous best-known result. The integral distinguishers discovered by neural networks enable key recovery attacks on more rounds. We identify a 7 rounds key independent integral distinguisher from neural networks with even only one active plaintext cell, which is based on linear combinations of bits. This distinguisher enables a 15 rounds key recovery attack on SKINNYn/n, improving upon the previous record by one round. Additionally, we discover an 8 rounds key dependent integral distinguisher using neural network that further reduces the time complexity of key recovery attacks against SKINNY.
Improved Differential-neural Cryptanalysis for Round-reduced Simeck32/64
Jan 27, 2023In CRYPTO 2019, Gohr presented differential-neural cryptanalysis by building the differential distinguisher with a neural network, achieving practical 11-, and 12-round key recovery attack for Speck32/64. Inspired by this framework, we develop the Inception neural network that is compatible with the round function of Simeck to improve the accuracy of the neural distinguishers, thus improving the accuracy of (9-12)-round neural distinguishers for Simeck32/64. To provide solid baselines for neural distinguishers, we compute the full distribution of differences induced by one specific input difference up to 13-round Simeck32/64. Moreover, the performance of the DDT-based distinguishers in multiple ciphertext pairs is evaluated. Compared with the DDT-based distinguishers, the 9-, and 10-round neural distinguishers achieve better accuracy. Also, an in-depth analysis of the wrong key response profile revealed that the 12-th and 13-th bits of the subkey have little effect on the score of the neural distinguisher, thereby accelerating key recovery attacks. Finally, an enhanced 15-round and the first practical 16-, and 17-round attacks are implemented for Simeck32/64, and the success rate of both the 15-, and 16-round attacks is almost 100%.
One Sample Diffusion Model in Projection Domain for Low-Dose CT Imaging
Dec 07, 2022



Low-dose computed tomography (CT) plays a significant role in reducing the radiation risk in clinical applications. However, lowering the radiation dose will significantly degrade the image quality. With the rapid development and wide application of deep learning, it has brought new directions for the development of low-dose CT imaging algorithms. Therefore, we propose a fully unsupervised one sample diffusion model (OSDM)in projection domain for low-dose CT reconstruction. To extract sufficient prior information from single sample, the Hankel matrix formulation is employed. Besides, the penalized weighted least-squares and total variation are introduced to achieve superior image quality. Specifically, we first train a score-based generative model on one sinogram by extracting a great number of tensors from the structural-Hankel matrix as the network input to capture prior distribution. Then, at the inference stage, the stochastic differential equation solver and data consistency step are performed iteratively to obtain the sinogram data. Finally, the final image is obtained through the filtered back-projection algorithm. The reconstructed results are approaching to the normal-dose counterparts. The results prove that OSDM is practical and effective model for reducing the artifacts and preserving the image quality.
Generative Modeling in Sinogram Domain for Sparse-view CT Reconstruction
Nov 25, 2022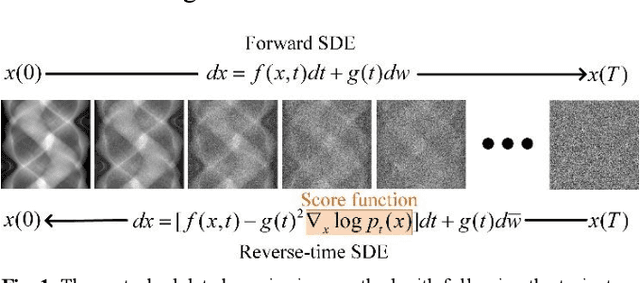
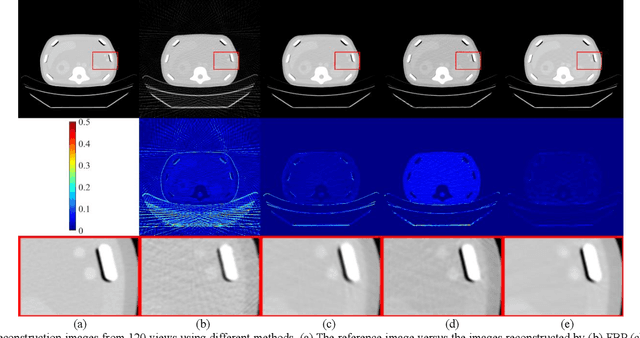
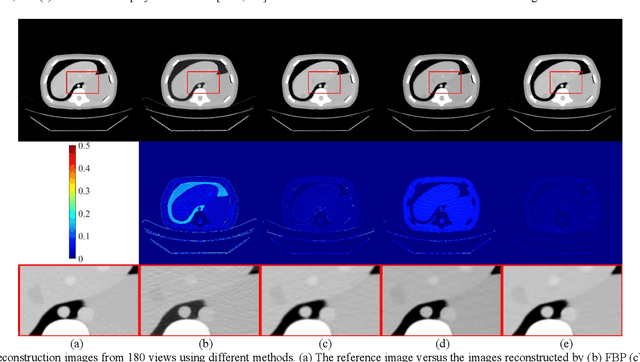
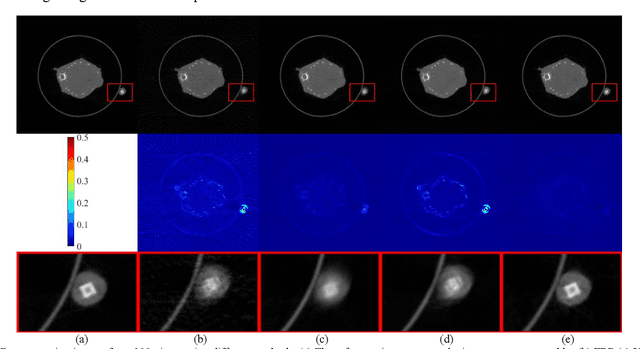
The radiation dose in computed tomography (CT) examinations is harmful for patients but can be significantly reduced by intuitively decreasing the number of projection views. Reducing projection views usually leads to severe aliasing artifacts in reconstructed images. Previous deep learning (DL) techniques with sparse-view data require sparse-view/full-view CT image pairs to train the network with supervised manners. When the number of projection view changes, the DL network should be retrained with updated sparse-view/full-view CT image pairs. To relieve this limitation, we present a fully unsupervised score-based generative model in sinogram domain for sparse-view CT reconstruction. Specifically, we first train a score-based generative model on full-view sinogram data and use multi-channel strategy to form highdimensional tensor as the network input to capture their prior distribution. Then, at the inference stage, the stochastic differential equation (SDE) solver and data-consistency step were performed iteratively to achieve fullview projection. Filtered back-projection (FBP) algorithm was used to achieve the final image reconstruction. Qualitative and quantitative studies were implemented to evaluate the presented method with several CT data. Experimental results demonstrated that our method achieved comparable or better performance than the supervised learning counterparts.
Research on Stable Obstacle Avoidance Control Strategy for Tracked Intelligent Transportation Vehicles in Non-structural Environment Based on Deep Learning
Jul 30, 2022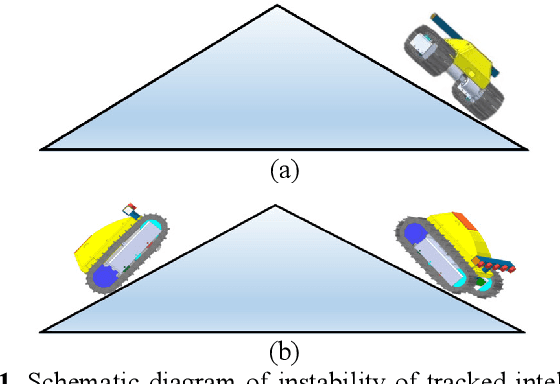
Existing intelligent driving technology often has a problem in balancing smooth driving and fast obstacle avoidance, especially when the vehicle is in a non-structural environment, and is prone to instability in emergency situations. Therefore, this study proposed an autonomous obstacle avoidance control strategy that can effectively guarantee vehicle stability based on Attention-long short-term memory (Attention-LSTM) deep learning model with the idea of humanoid driving. First, we designed the autonomous obstacle avoidance control rules to guarantee the safety of unmanned vehicles. Second, we improved the autonomous obstacle avoidance control strategy combined with the stability analysis of special vehicles. Third, we constructed a deep learning obstacle avoidance control through experiments, and the average relative error of this system was 15%. Finally, the stability and accuracy of this control strategy were verified numerically and experimentally. The method proposed in this study can ensure that the unmanned vehicle can successfully avoid the obstacles while driving smoothly.