 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRLLaVA: An RL-central Framework for Language and Vision Assistants
Dec 25, 2025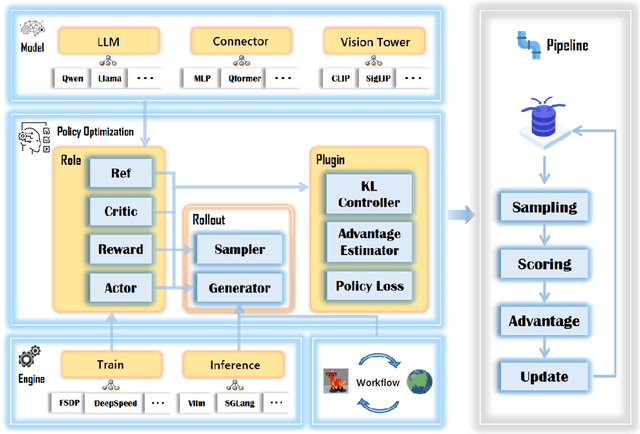
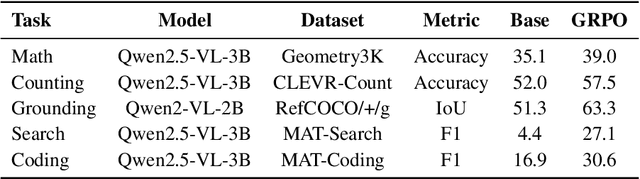
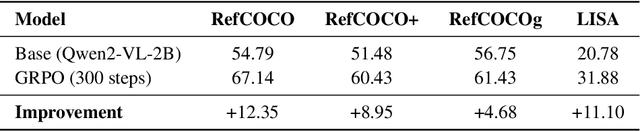
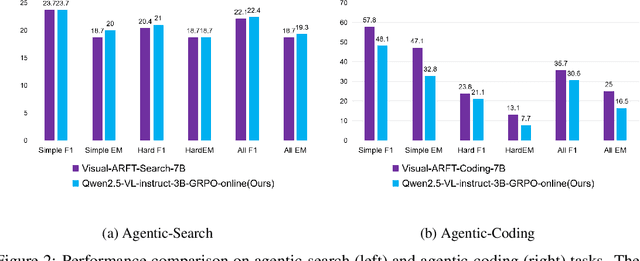
We present an RL-central framework for Language and Vision Assistants (RLLaVA) with its formulation of Markov decision process (MDP). RLLaVA decouples RL algorithmic logic from model architecture and distributed execution, supporting researchers in implementing new RL algorithms with minimal code, and to plug in a broad family of RL methods and vision-language models (VLMs) while remaining agnostic to specific training and inference engines. RLLaVA makes resource-efficient training of 1B--7B models feasible on common GPUs; notably, 4B-scale models can be trained end-to-end with full-parameter updates on a single 24GB GPU. Experiments on multi-modal and agentic tasks demonstrate that RLLaVA has task extensibility, and the models trained with it consistently improve performance over base models, competitive with other specially engineered RL frameworks. The code is available at https://github.com/TinyLoopX/RLLaVA.
An MPC-based Optimal Motion Control Framework for Pendulum-driven Spherical Robots
Feb 17, 2023



Motion control is essential for all autonomous mobile robots, and even more so for spherical robots. Due to the uniqueness of the spherical robot, its motion control must not only ensure accurate tracking of the target commands, but also minimize fluctuations in the robot's attitude and motors' current while tracking. In this paper, model predictive control (MPC) is applied to the control of spherical robots and an MPC-based motion control framework is designed. There are two controllers in the framework, an optimal velocity controller ESO-MPC which combines extend states observers (ESO) and MPC, and an optimal orientation controller that uses multilayer perceptron (MLP) to generate accurate trajectories and MPC with changing weights to achieve optimal control. Finally, the performance of individual controllers and the whole control framework are verified by physical experiments. The experimental results show that the MPC-based motion control framework proposed in this work is much better than PID in terms of rapidity and accuracy, and has great advantages over sliding mode controller (SMC) for overshoot, attitude stability, current stability and energy consumption.
One Sample Diffusion Model in Projection Domain for Low-Dose CT Imaging
Dec 07, 2022



Low-dose computed tomography (CT) plays a significant role in reducing the radiation risk in clinical applications. However, lowering the radiation dose will significantly degrade the image quality. With the rapid development and wide application of deep learning, it has brought new directions for the development of low-dose CT imaging algorithms. Therefore, we propose a fully unsupervised one sample diffusion model (OSDM)in projection domain for low-dose CT reconstruction. To extract sufficient prior information from single sample, the Hankel matrix formulation is employed. Besides, the penalized weighted least-squares and total variation are introduced to achieve superior image quality. Specifically, we first train a score-based generative model on one sinogram by extracting a great number of tensors from the structural-Hankel matrix as the network input to capture prior distribution. Then, at the inference stage, the stochastic differential equation solver and data consistency step are performed iteratively to obtain the sinogram data. Finally, the final image is obtained through the filtered back-projection algorithm. The reconstructed results are approaching to the normal-dose counterparts. The results prove that OSDM is practical and effective model for reducing the artifacts and preserving the image quality.