 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIMUSIC: IMU-based Facial Expression Capture
Feb 03, 2024



For facial motion capture and analysis, the dominated solutions are generally based on visual cues, which cannot protect privacy and are vulnerable to occlusions. Inertial measurement units (IMUs) serve as potential rescues yet are mainly adopted for full-body motion capture. In this paper, we propose IMUSIC to fill the gap, a novel path for facial expression capture using purely IMU signals, significantly distant from previous visual solutions.The key design in our IMUSIC is a trilogy. We first design micro-IMUs to suit facial capture, companion with an anatomy-driven IMU placement scheme. Then, we contribute a novel IMU-ARKit dataset, which provides rich paired IMU/visual signals for diverse facial expressions and performances. Such unique multi-modality brings huge potential for future directions like IMU-based facial behavior analysis. Moreover, utilizing IMU-ARKit, we introduce a strong baseline approach to accurately predict facial blendshape parameters from purely IMU signals. Specifically, we tailor a Transformer diffusion model with a two-stage training strategy for this novel tracking task. The IMUSIC framework empowers us to perform accurate facial capture in scenarios where visual methods falter and simultaneously safeguard user privacy. We conduct extensive experiments about both the IMU configuration and technical components to validate the effectiveness of our IMUSIC approach. Notably, IMUSIC enables various potential and novel applications, i.e., privacy-protecting facial capture, hybrid capture against occlusions, or detecting minute facial movements that are often invisible through visual cues. We will release our dataset and implementations to enrich more possibilities of facial capture and analysis in our community.
GaussianShader: 3D Gaussian Splatting with Shading Functions for Reflective Surfaces
Nov 29, 2023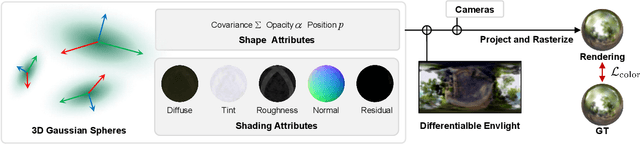
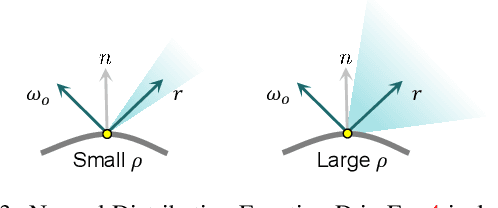
The advent of neural 3D Gaussians has recently brought about a revolution in the field of neural rendering, facilitating the generation of high-quality renderings at real-time speeds. However, the explicit and discrete representation encounters challenges when applied to scenes featuring reflective surfaces. In this paper, we present GaussianShader, a novel method that applies a simplified shading function on 3D Gaussians to enhance the neural rendering in scenes with reflective surfaces while preserving the training and rendering efficiency. The main challenge in applying the shading function lies in the accurate normal estimation on discrete 3D Gaussians. Specifically, we proposed a novel normal estimation framework based on the shortest axis directions of 3D Gaussians with a delicately designed loss to make the consistency between the normals and the geometries of Gaussian spheres. Experiments show that GaussianShader strikes a commendable balance between efficiency and visual quality. Our method surpasses Gaussian Splatting in PSNR on specular object datasets, exhibiting an improvement of 1.57dB. When compared to prior works handling reflective surfaces, such as Ref-NeRF, our optimization time is significantly accelerated (23h vs. 0.58h). Please click on our project website to see more results.
NIMBLE: A Non-rigid Hand Model with Bones and Muscles
Feb 09, 2022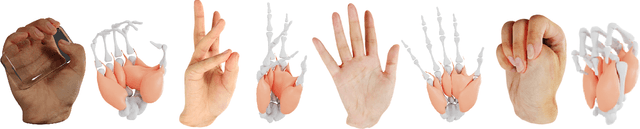
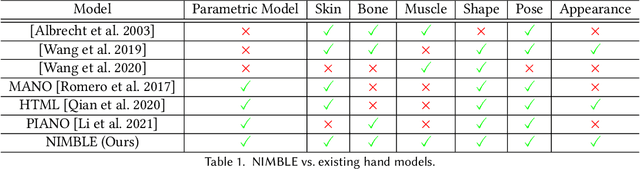
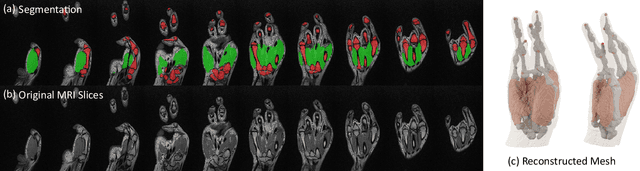
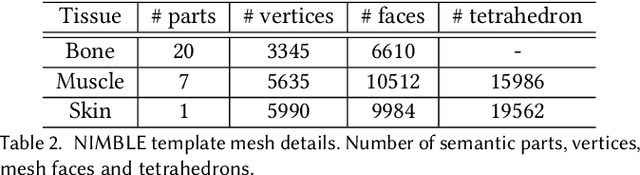
Emerging Metaverse applications demand reliable, accurate, and photorealistic reproductions of human hands to perform sophisticated operations as if in the physical world. While real human hand represents one of the most intricate coordination between bones, muscle, tendon, and skin, state-of-the-art techniques unanimously focus on modeling only the skeleton of the hand. In this paper, we present NIMBLE, a novel parametric hand model that includes the missing key components, bringing 3D hand model to a new level of realism. We first annotate muscles, bones and skins on the recent Magnetic Resonance Imaging hand (MRI-Hand) dataset and then register a volumetric template hand onto individual poses and subjects within the dataset. NIMBLE consists of 20 bones as triangular meshes, 7 muscle groups as tetrahedral meshes, and a skin mesh. Via iterative shape registration and parameter learning, it further produces shape blend shapes, pose blend shapes, and a joint regressor. We demonstrate applying NIMBLE to modeling, rendering, and visual inference tasks. By enforcing the inner bones and muscles to match anatomic and kinematic rules, NIMBLE can animate 3D hands to new poses at unprecedented realism. To model the appearance of skin, we further construct a photometric HandStage to acquire high-quality textures and normal maps to model wrinkles and palm print. Finally, NIMBLE also benefits learning-based hand pose and shape estimation by either synthesizing rich data or acting directly as a differentiable layer in the inference network.