 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCan LVLMs Obtain a Driver's License? A Benchmark Towards Reliable AGI for Autonomous Driving
Sep 04, 2024Large Vision-Language Models (LVLMs) have recently garnered significant attention, with many efforts aimed at harnessing their general knowledge to enhance the interpretability and robustness of autonomous driving models. However, LVLMs typically rely on large, general-purpose datasets and lack the specialized expertise required for professional and safe driving. Existing vision-language driving datasets focus primarily on scene understanding and decision-making, without providing explicit guidance on traffic rules and driving skills, which are critical aspects directly related to driving safety. To bridge this gap, we propose IDKB, a large-scale dataset containing over one million data items collected from various countries, including driving handbooks, theory test data, and simulated road test data. Much like the process of obtaining a driver's license, IDKB encompasses nearly all the explicit knowledge needed for driving from theory to practice. In particular, we conducted comprehensive tests on 15 LVLMs using IDKB to assess their reliability in the context of autonomous driving and provided extensive analysis. We also fine-tuned popular models, achieving notable performance improvements, which further validate the significance of our dataset. The project page can be found at: \url{https://4dvlab.github.io/project_page/idkb.html}
GaussianShader: 3D Gaussian Splatting with Shading Functions for Reflective Surfaces
Nov 29, 2023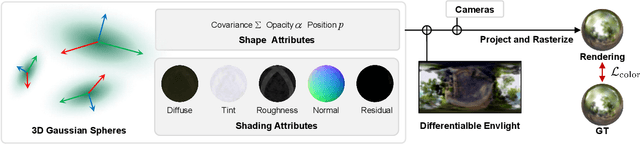
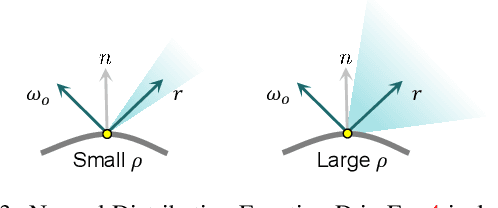
The advent of neural 3D Gaussians has recently brought about a revolution in the field of neural rendering, facilitating the generation of high-quality renderings at real-time speeds. However, the explicit and discrete representation encounters challenges when applied to scenes featuring reflective surfaces. In this paper, we present GaussianShader, a novel method that applies a simplified shading function on 3D Gaussians to enhance the neural rendering in scenes with reflective surfaces while preserving the training and rendering efficiency. The main challenge in applying the shading function lies in the accurate normal estimation on discrete 3D Gaussians. Specifically, we proposed a novel normal estimation framework based on the shortest axis directions of 3D Gaussians with a delicately designed loss to make the consistency between the normals and the geometries of Gaussian spheres. Experiments show that GaussianShader strikes a commendable balance between efficiency and visual quality. Our method surpasses Gaussian Splatting in PSNR on specular object datasets, exhibiting an improvement of 1.57dB. When compared to prior works handling reflective surfaces, such as Ref-NeRF, our optimization time is significantly accelerated (23h vs. 0.58h). Please click on our project website to see more results.