 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHigh Definition Map Mapping and Update: A General Overview and Future Directions
Sep 15, 2024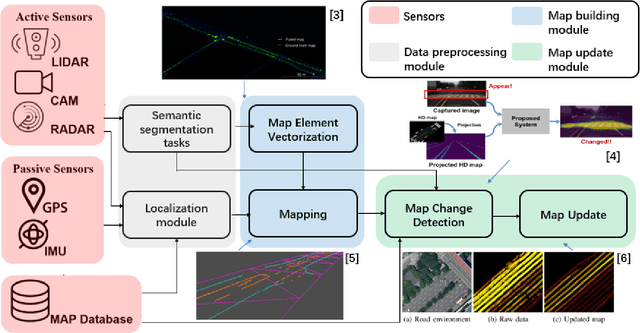
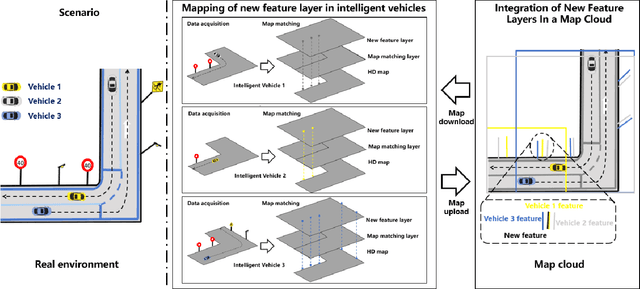

Along with the rapid growth of autonomous vehicles (AVs), more and more demands are required for environment perception technology. Among others, HD mapping has become one of the more prominent roles in helping the vehicle realize essential tasks such as localization and path planning. While increasing research efforts have been directed toward HD Map development. However, a comprehensive overview of the overall HD map mapping and update framework is still lacking. This article introduces the development and current state of the algorithm involved in creating HD map mapping and its maintenance. As part of this study, the primary data preprocessing approach of processing raw data to information ready to feed for mapping and update purposes, semantic segmentation, and localization are also briefly reviewed. Moreover, the map taxonomy, ontology, and quality assessment are extensively discussed, the map data's general representation method is presented, and the mapping algorithm ranging from SLAM to transformers learning-based approaches are also discussed. The development of the HD map update algorithm, from change detection to the update methods, is also presented. Finally, the authors discuss possible future developments and the remaining challenges in HD map mapping and update technology. This paper simultaneously serves as a position paper and tutorial to those new to HD map mapping and update domains.
DiffMap: Enhancing Map Segmentation with Map Prior Using Diffusion Model
May 03, 2024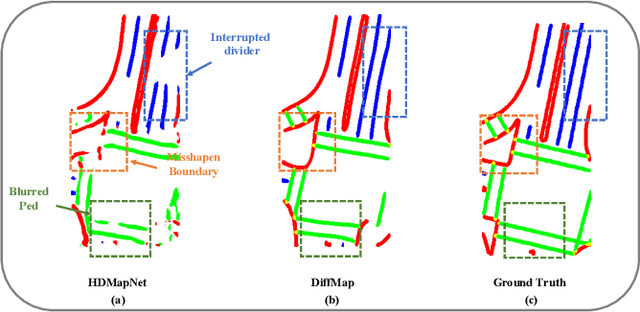
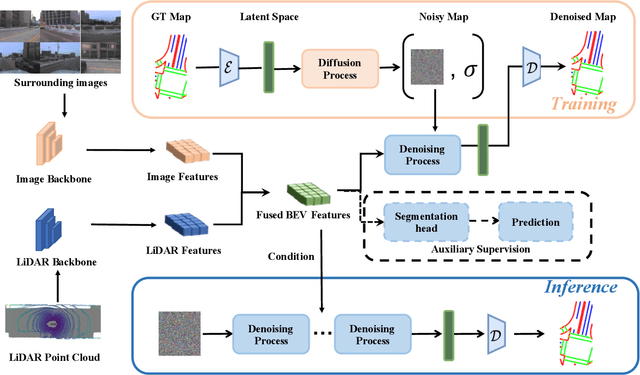
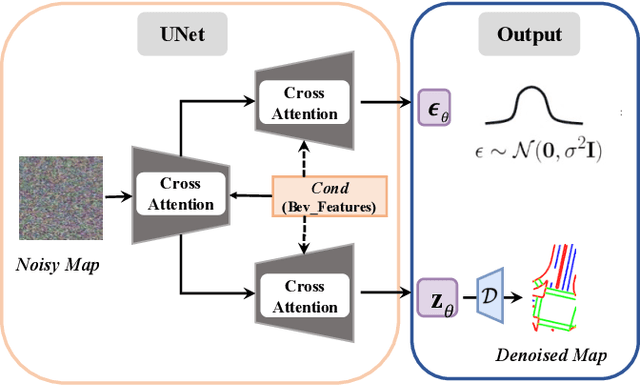
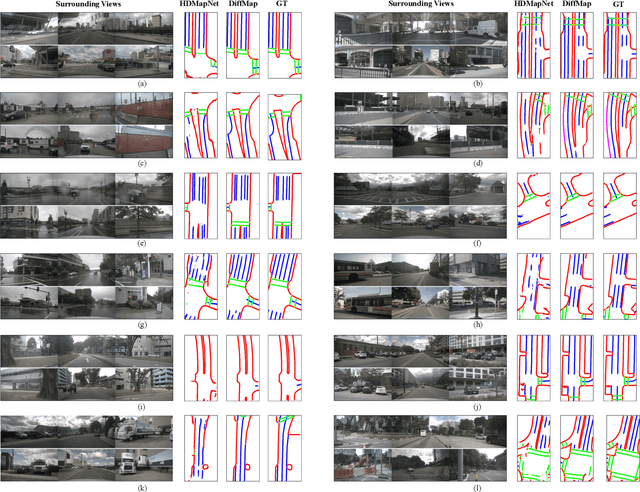
Constructing high-definition (HD) maps is a crucial requirement for enabling autonomous driving. In recent years, several map segmentation algorithms have been developed to address this need, leveraging advancements in Bird's-Eye View (BEV) perception. However, existing models still encounter challenges in producing realistic and consistent semantic map layouts. One prominent issue is the limited utilization of structured priors inherent in map segmentation masks. In light of this, we propose DiffMap, a novel approach specifically designed to model the structured priors of map segmentation masks using latent diffusion model. By incorporating this technique, the performance of existing semantic segmentation methods can be significantly enhanced and certain structural errors present in the segmentation outputs can be effectively rectified. Notably, the proposed module can be seamlessly integrated into any map segmentation model, thereby augmenting its capability to accurately delineate semantic information. Furthermore, through extensive visualization analysis, our model demonstrates superior proficiency in generating results that more accurately reflect real-world map layouts, further validating its efficacy in improving the quality of the generated maps.
AMRec: An Intelligent System for Academic Method Recommendation
Apr 10, 2019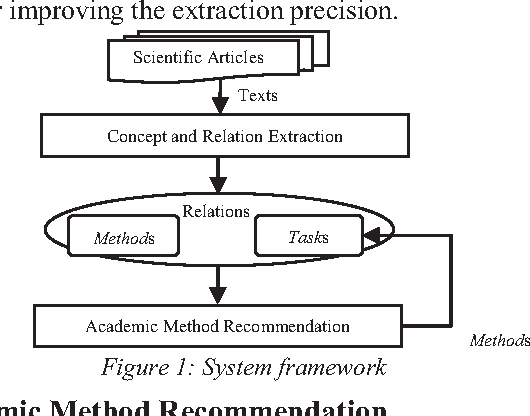
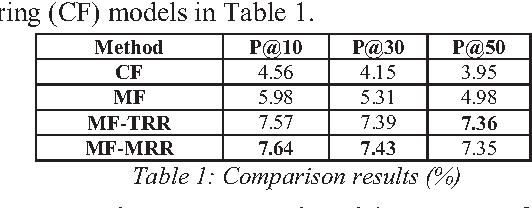
Finding new academic Methods for research problems is the key task in a researcher's research career. It is usually very difficult for new researchers to find good Methods for their research problems since they lack of research experiences. In order to help researchers carry out their researches in a more convenient way, we describe a novel recommendation system called AMRec to recommend new academic Methods for research problems in this paper. Our proposed system first extracts academic concepts (Tasks and Methods) and their relations from academic literatures, and then leverages the regularized matrix factorization Method for academic Method recommendation. Preliminary evaluation results verify the effectiveness of our proposed system.