 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHigh Definition Map Mapping and Update: A General Overview and Future Directions
Sep 15, 2024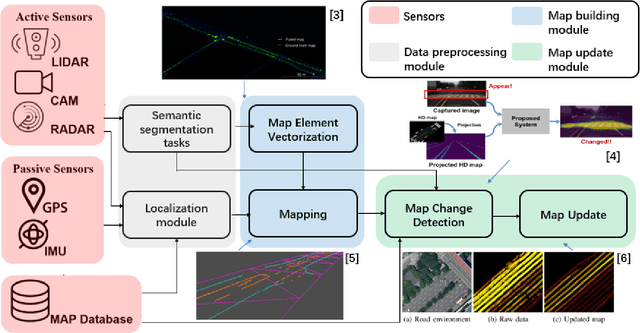

Along with the rapid growth of autonomous vehicles (AVs), more and more demands are required for environment perception technology. Among others, HD mapping has become one of the more prominent roles in helping the vehicle realize essential tasks such as localization and path planning. While increasing research efforts have been directed toward HD Map development. However, a comprehensive overview of the overall HD map mapping and update framework is still lacking. This article introduces the development and current state of the algorithm involved in creating HD map mapping and its maintenance. As part of this study, the primary data preprocessing approach of processing raw data to information ready to feed for mapping and update purposes, semantic segmentation, and localization are also briefly reviewed. Moreover, the map taxonomy, ontology, and quality assessment are extensively discussed, the map data's general representation method is presented, and the mapping algorithm ranging from SLAM to transformers learning-based approaches are also discussed. The development of the HD map update algorithm, from change detection to the update methods, is also presented. Finally, the authors discuss possible future developments and the remaining challenges in HD map mapping and update technology. This paper simultaneously serves as a position paper and tutorial to those new to HD map mapping and update domains.
Map Container: A Map-based Framework for Cooperative Perception
Aug 28, 2022

The idea of cooperative perception is to benefit from shared perception data between multiple vehicles and overcome the limitations of on-board sensors on single vehicle. However, the fusion of multi-vehicle information is still challenging due to inaccurate localization, limited communication bandwidth and ambiguous fusion. Past practices simplify the problem by placing a precise GNSS localization system, manually specify the number of connected vehicles and determine the fusion strategy. This paper proposes a map-based cooperative perception framework, named map container, to improve the accuracy and robustness of cooperative perception, which ultimately overcomes this problem. The concept 'Map Container' denotes that the map serves as the platform to transform all information into the map coordinate space automatically and incorporate different sources of information in a distributed fusion architecture. In the proposed map container, the GNSS signal and the matching relationship between sensor feature and map feature are considered to optimize the estimation of environment states. Evaluation on simulation dataset and real-vehicle platform result validates the effectiveness of the proposed method.