 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSmokeGS-R: Physics-Guided Pseudo-Clean 3DGS for Real-World Multi-View Smoke Restoration
Apr 07, 2026Real-world smoke simultaneously attenuates scene radiance, adds airlight, and destabilizes multi-view appearance consistency, making robust 3D reconstruction particularly difficult. We present \textbf{SmokeGS-R}, a practical pipeline developed for the NTIRE 2026 3D Restoration and Reconstruction Track 2 challenge. The key idea is to decouple geometry recovery from appearance correction: we generate physics-guided pseudo-clean supervision with a refined dark channel prior and guided filtering, train a sharp clean-only 3D Gaussian Splatting source model, and then harmonize its renderings with a donor ensemble using geometric-mean reference aggregation, LAB-space Reinhard transfer, and light Gaussian smoothing. On the official challenge testing leaderboard, the final submission achieved \mbox{PSNR $=15.217$} and \mbox{SSIM $=0.666$}. After the public release of RealX3D, we re-evaluated the same frozen result on the seven released challenge scenes without retraining and obtained \mbox{PSNR $=15.209$}, \mbox{SSIM $=0.644$}, and \mbox{LPIPS $=0.551$}, outperforming the strongest official baseline average on the same scenes by $+3.68$ dB PSNR. These results suggest that a geometry-first reconstruction strategy combined with stable post-render appearance harmonization is an effective recipe for real-world multi-view smoke restoration. The code is available at https://github.com/windrise/3drr_Track2_SmokeGS-R.
NTIRE 2026 3D Restoration and Reconstruction in Real-world Adverse Conditions: RealX3D Challenge Results
Apr 05, 2026This paper presents a comprehensive review of the NTIRE 2026 3D Restoration and Reconstruction (3DRR) Challenge, detailing the proposed methods and results. The challenge seeks to identify robust reconstruction pipelines that are robust under real-world adverse conditions, specifically extreme low-light and smoke-degraded environments, as captured by our RealX3D benchmark. A total of 279 participants registered for the competition, of whom 33 teams submitted valid results. We thoroughly evaluate the submitted approaches against state-of-the-art baselines, revealing significant progress in 3D reconstruction under adverse conditions. Our analysis highlights shared design principles among top-performing methods and provides insights into effective strategies for handling 3D scene degradation.
RadGS-Reg: Registering Spine CT with Biplanar X-rays via Joint 3D Radiative Gaussians Reconstruction and 3D/3D Registration
Aug 28, 2025Computed Tomography (CT)/X-ray registration in image-guided navigation remains challenging because of its stringent requirements for high accuracy and real-time performance. Traditional "render and compare" methods, relying on iterative projection and comparison, suffer from spatial information loss and domain gap. 3D reconstruction from biplanar X-rays supplements spatial and shape information for 2D/3D registration, but current methods are limited by dense-view requirements and struggles with noisy X-rays. To address these limitations, we introduce RadGS-Reg, a novel framework for vertebral-level CT/X-ray registration through joint 3D Radiative Gaussians (RadGS) reconstruction and 3D/3D registration. Specifically, our biplanar X-rays vertebral RadGS reconstruction module explores learning-based RadGS reconstruction method with a Counterfactual Attention Learning (CAL) mechanism, focusing on vertebral regions in noisy X-rays. Additionally, a patient-specific pre-training strategy progressively adapts the RadGS-Reg from simulated to real data while simultaneously learning vertebral shape prior knowledge. Experiments on in-house datasets demonstrate the state-of-the-art performance for both tasks, surpassing existing methods. The code is available at: https://github.com/shenao1995/RadGS_Reg.
Dyna3DGR: 4D Cardiac Motion Tracking with Dynamic 3D Gaussian Representation
Jul 22, 2025Accurate analysis of cardiac motion is crucial for evaluating cardiac function. While dynamic cardiac magnetic resonance imaging (CMR) can capture detailed tissue motion throughout the cardiac cycle, the fine-grained 4D cardiac motion tracking remains challenging due to the homogeneous nature of myocardial tissue and the lack of distinctive features. Existing approaches can be broadly categorized into image based and representation-based, each with its limitations. Image-based methods, including both raditional and deep learning-based registration approaches, either struggle with topological consistency or rely heavily on extensive training data. Representation-based methods, while promising, often suffer from loss of image-level details. To address these limitations, we propose Dynamic 3D Gaussian Representation (Dyna3DGR), a novel framework that combines explicit 3D Gaussian representation with implicit neural motion field modeling. Our method simultaneously optimizes cardiac structure and motion in a self-supervised manner, eliminating the need for extensive training data or point-to-point correspondences. Through differentiable volumetric rendering, Dyna3DGR efficiently bridges continuous motion representation with image-space alignment while preserving both topological and temporal consistency. Comprehensive evaluations on the ACDC dataset demonstrate that our approach surpasses state-of-the-art deep learning-based diffeomorphic registration methods in tracking accuracy. The code will be available in https://github.com/windrise/Dyna3DGR.
3DGR-CAR: Coronary artery reconstruction from ultra-sparse 2D X-ray views with a 3D Gaussians representation
Oct 01, 2024Reconstructing 3D coronary arteries is important for coronary artery disease diagnosis, treatment planning and operation navigation. Traditional reconstruction techniques often require many projections, while reconstruction from sparse-view X-ray projections is a potential way of reducing radiation dose. However, the extreme sparsity of coronary arteries in a 3D volume and ultra-limited number of projections pose significant challenges for efficient and accurate 3D reconstruction. To this end, we propose 3DGR-CAR, a 3D Gaussian Representation for Coronary Artery Reconstruction from ultra-sparse X-ray projections. We leverage 3D Gaussian representation to avoid the inefficiency caused by the extreme sparsity of coronary artery data and propose a Gaussian center predictor to overcome the noisy Gaussian initialization from ultra-sparse view projections. The proposed scheme enables fast and accurate 3D coronary artery reconstruction with only 2 views. Experimental results on two datasets indicate that the proposed approach significantly outperforms other methods in terms of voxel accuracy and visual quality of coronary arteries. The code will be available in https://github.com/windrise/3DGR-CAR.
HySparK: Hybrid Sparse Masking for Large Scale Medical Image Pre-Training
Aug 11, 2024



The generative self-supervised learning strategy exhibits remarkable learning representational capabilities. However, there is limited attention to end-to-end pre-training methods based on a hybrid architecture of CNN and Transformer, which can learn strong local and global representations simultaneously. To address this issue, we propose a generative pre-training strategy called Hybrid Sparse masKing (HySparK) based on masked image modeling and apply it to large-scale pre-training on medical images. First, we perform a bottom-up 3D hybrid masking strategy on the encoder to keep consistency masking. Then we utilize sparse convolution for the top CNNs and encode unmasked patches for the bottom vision Transformers. Second, we employ a simple hierarchical decoder with skip-connections to achieve dense multi-scale feature reconstruction. Third, we implement our pre-training method on a collection of multiple large-scale 3D medical imaging datasets. Extensive experiments indicate that our proposed pre-training strategy demonstrates robust transfer-ability in supervised downstream tasks and sheds light on HySparK's promising prospects. The code is available at https://github.com/FengheTan9/HySparK
Sparse-view CT Reconstruction with 3D Gaussian Volumetric Representation
Dec 25, 2023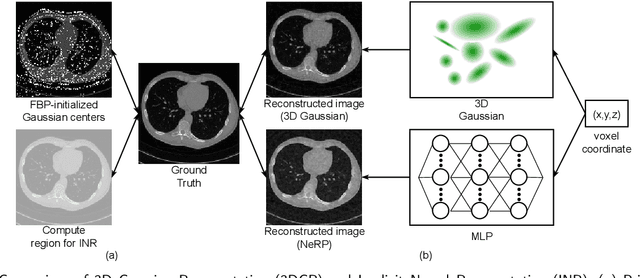
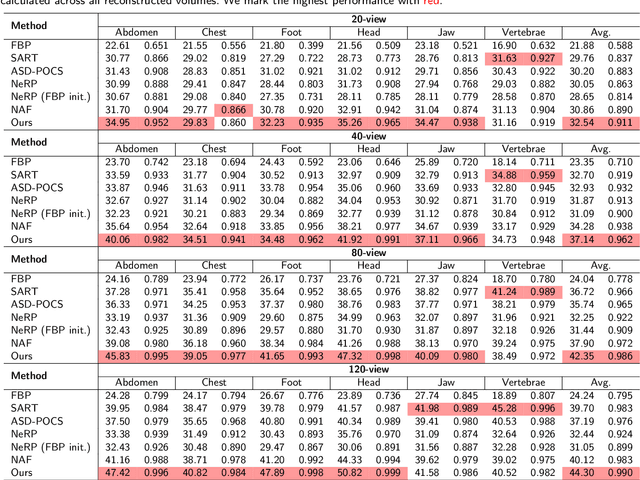
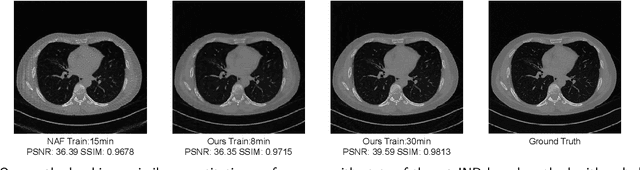

Sparse-view CT is a promising strategy for reducing the radiation dose of traditional CT scans, but reconstructing high-quality images from incomplete and noisy data is challenging. Recently, 3D Gaussian has been applied to model complex natural scenes, demonstrating fast convergence and better rendering of novel views compared to implicit neural representations (INRs). Taking inspiration from the successful application of 3D Gaussians in natural scene modeling and novel view synthesis, we investigate their potential for sparse-view CT reconstruction. We leverage prior information from the filtered-backprojection reconstructed image to initialize the Gaussians; and update their parameters via comparing difference in the projection space. Performance is further enhanced by adaptive density control. Compared to INRs, 3D Gaussians benefit more from prior information to explicitly bypass learning in void spaces and allocate the capacity efficiently, accelerating convergence. 3D Gaussians also efficiently learn high-frequency details. Trained in a self-supervised manner, 3D Gaussians avoid the need for large-scale paired data. Our experiments on the AAPM-Mayo dataset demonstrate that 3D Gaussians can provide superior performance compared to INR-based methods. This work is in progress, and the code will be publicly available.
Gait Cycle-Inspired Learning Strategy for Continuous Prediction of Knee Joint Trajectory from sEMG
Jul 25, 2023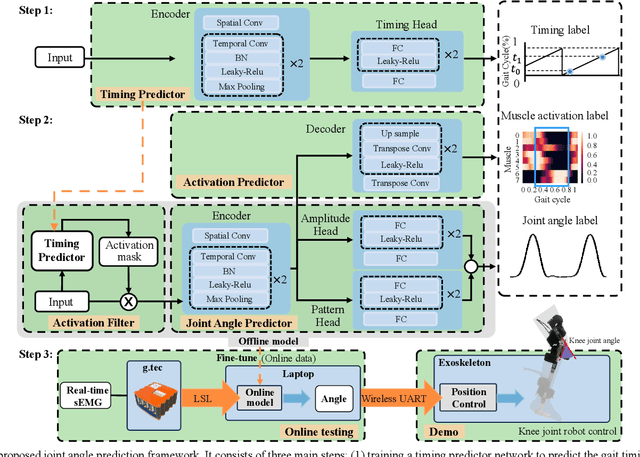
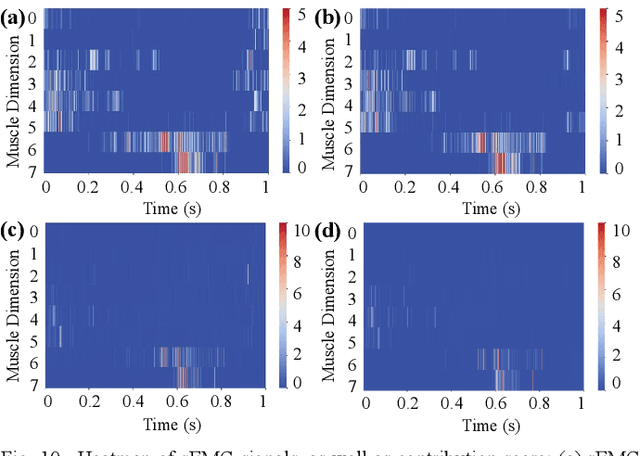
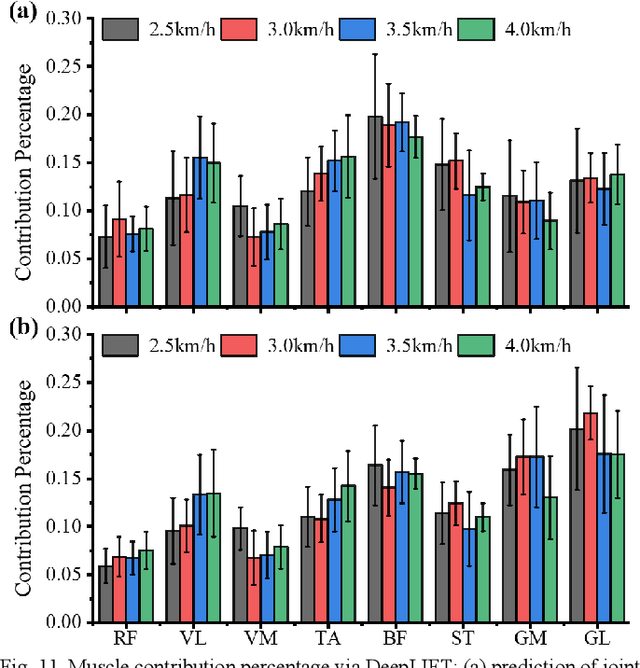
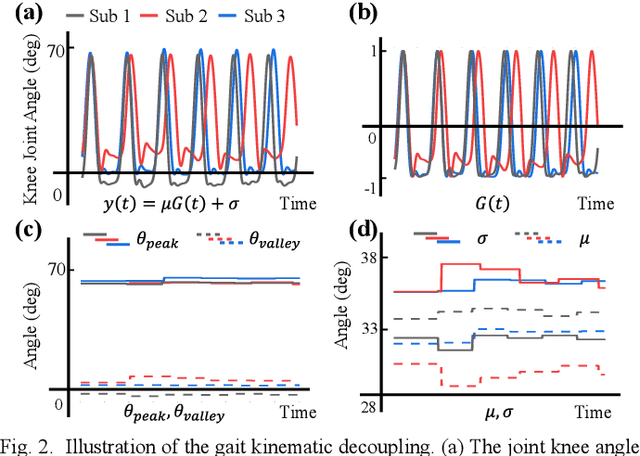
Predicting lower limb motion intent is vital for controlling exoskeleton robots and prosthetic limbs. Surface electromyography (sEMG) attracts increasing attention in recent years as it enables ahead-of-time prediction of motion intentions before actual movement. However, the estimation performance of human joint trajectory remains a challenging problem due to the inter- and intra-subject variations. The former is related to physiological differences (such as height and weight) and preferred walking patterns of individuals, while the latter is mainly caused by irregular and gait-irrelevant muscle activity. This paper proposes a model integrating two gait cycle-inspired learning strategies to mitigate the challenge for predicting human knee joint trajectory. The first strategy is to decouple knee joint angles into motion patterns and amplitudes former exhibit low variability while latter show high variability among individuals. By learning through separate network entities, the model manages to capture both the common and personalized gait features. In the second, muscle principal activation masks are extracted from gait cycles in a prolonged walk. These masks are used to filter out components unrelated to walking from raw sEMG and provide auxiliary guidance to capture more gait-related features. Experimental results indicate that our model could predict knee angles with the average root mean square error (RMSE) of 3.03(0.49) degrees and 50ms ahead of time. To our knowledge this is the best performance in relevant literatures that has been reported, with reduced RMSE by at least 9.5%.