 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe establishment of static digital humans and the integration with spinal models
Feb 11, 2025Adolescent idiopathic scoliosis (AIS), a prevalent spinal deformity, significantly affects individuals' health and quality of life. Conventional imaging techniques, such as X - rays, computed tomography (CT), and magnetic resonance imaging (MRI), offer static views of the spine. However, they are restricted in capturing the dynamic changes of the spine and its interactions with overall body motion. Therefore, developing new techniques to address these limitations has become extremely important. Dynamic digital human modeling represents a major breakthrough in digital medicine. It enables a three - dimensional (3D) view of the spine as it changes during daily activities, assisting clinicians in detecting deformities that might be missed in static imaging. Although dynamic modeling holds great potential, constructing an accurate static digital human model is a crucial initial step for high - precision simulations. In this study, our focus is on constructing an accurate static digital human model integrating the spine, which is vital for subsequent dynamic digital human research on AIS. First, we generate human point - cloud data by combining the 3D Gaussian method with the Skinned Multi - Person Linear (SMPL) model from the patient's multi - view images. Then, we fit a standard skeletal model to the generated human model. Next, we align the real spine model reconstructed from CT images with the standard skeletal model. We validated the resulting personalized spine model using X - ray data from six AIS patients, with Cobb angles (used to measure the severity of scoliosis) as evaluation metrics. The results indicate that the model's error was within 1 degree of the actual measurements. This study presents an important method for constructing digital humans.
Gait Cycle-Inspired Learning Strategy for Continuous Prediction of Knee Joint Trajectory from sEMG
Jul 25, 2023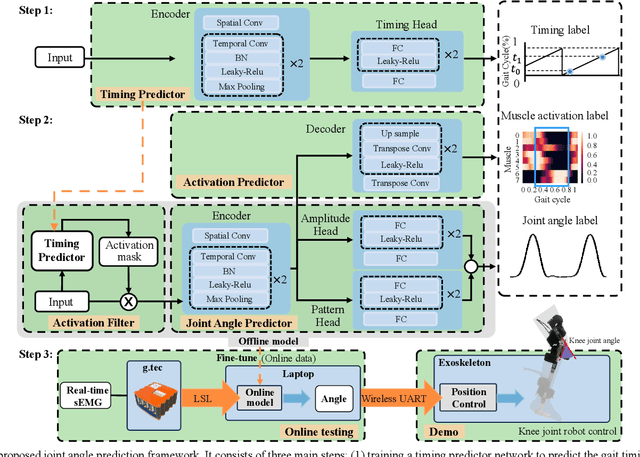
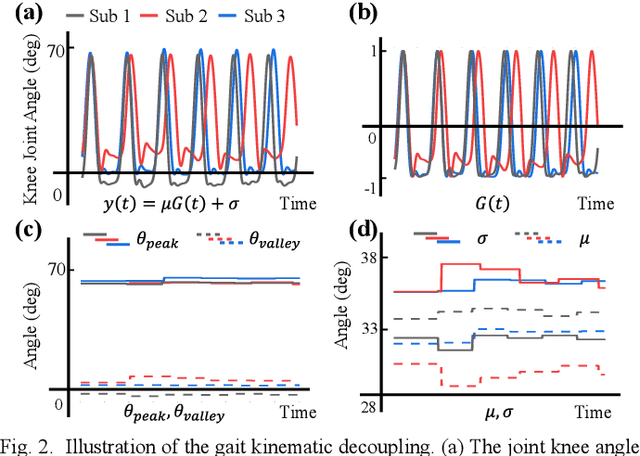
Predicting lower limb motion intent is vital for controlling exoskeleton robots and prosthetic limbs. Surface electromyography (sEMG) attracts increasing attention in recent years as it enables ahead-of-time prediction of motion intentions before actual movement. However, the estimation performance of human joint trajectory remains a challenging problem due to the inter- and intra-subject variations. The former is related to physiological differences (such as height and weight) and preferred walking patterns of individuals, while the latter is mainly caused by irregular and gait-irrelevant muscle activity. This paper proposes a model integrating two gait cycle-inspired learning strategies to mitigate the challenge for predicting human knee joint trajectory. The first strategy is to decouple knee joint angles into motion patterns and amplitudes former exhibit low variability while latter show high variability among individuals. By learning through separate network entities, the model manages to capture both the common and personalized gait features. In the second, muscle principal activation masks are extracted from gait cycles in a prolonged walk. These masks are used to filter out components unrelated to walking from raw sEMG and provide auxiliary guidance to capture more gait-related features. Experimental results indicate that our model could predict knee angles with the average root mean square error (RMSE) of 3.03(0.49) degrees and 50ms ahead of time. To our knowledge this is the best performance in relevant literatures that has been reported, with reduced RMSE by at least 9.5%.