 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Soccer Skills for Humanoid Robots: A Progressive Perception-Action Framework
Feb 05, 2026Soccer presents a significant challenge for humanoid robots, demanding tightly integrated perception-action capabilities for tasks like perception-guided kicking and whole-body balance control. Existing approaches suffer from inter-module instability in modular pipelines or conflicting training objectives in end-to-end frameworks. We propose Perception-Action integrated Decision-making (PAiD), a progressive architecture that decomposes soccer skill acquisition into three stages: motion-skill acquisition via human motion tracking, lightweight perception-action integration for positional generalization, and physics-aware sim-to-real transfer. This staged decomposition establishes stable foundational skills, avoids reward conflicts during perception integration, and minimizes sim-to-real gaps. Experiments on the Unitree G1 demonstrate high-fidelity human-like kicking with robust performance under diverse conditions-including static or rolling balls, various positions, and disturbances-while maintaining consistent execution across indoor and outdoor scenarios. Our divide-and-conquer strategy advances robust humanoid soccer capabilities and offers a scalable framework for complex embodied skill acquisition. The project page is available at https://soccer-humanoid.github.io/.
HUSKY: Humanoid Skateboarding System via Physics-Aware Whole-Body Control
Feb 03, 2026While current humanoid whole-body control frameworks predominantly rely on the static environment assumptions, addressing tasks characterized by high dynamism and complex interactions presents a formidable challenge. In this paper, we address humanoid skateboarding, a highly challenging task requiring stable dynamic maneuvering on an underactuated wheeled platform. This integrated system is governed by non-holonomic constraints and tightly coupled human-object interactions. Successfully executing this task requires simultaneous mastery of hybrid contact dynamics and robust balance control on a mechanically coupled, dynamically unstable skateboard. To overcome the aforementioned challenges, we propose HUSKY, a learning-based framework that integrates humanoid-skateboard system modeling and physics-aware whole-body control. We first model the coupling relationship between board tilt and truck steering angles, enabling a principled analysis of system dynamics. Building upon this, HUSKY leverages Adversarial Motion Priors (AMP) to learn human-like pushing motions and employs a physics-guided, heading-oriented strategy for lean-to-steer behaviors. Moreover, a trajectory-guided mechanism ensures smooth and stable transitions between pushing and steering. Experimental results on the Unitree G1 humanoid platform demonstrate that our framework enables stable and agile maneuvering on skateboards in real-world scenarios. The project page is available on https://husky-humanoid.github.io/.
Towards Adaptive Humanoid Control via Multi-Behavior Distillation and Reinforced Fine-Tuning
Nov 11, 2025Humanoid robots are promising to learn a diverse set of human-like locomotion behaviors, including standing up, walking, running, and jumping. However, existing methods predominantly require training independent policies for each skill, yielding behavior-specific controllers that exhibit limited generalization and brittle performance when deployed on irregular terrains and in diverse situations. To address this challenge, we propose Adaptive Humanoid Control (AHC) that adopts a two-stage framework to learn an adaptive humanoid locomotion controller across different skills and terrains. Specifically, we first train several primary locomotion policies and perform a multi-behavior distillation process to obtain a basic multi-behavior controller, facilitating adaptive behavior switching based on the environment. Then, we perform reinforced fine-tuning by collecting online feedback in performing adaptive behaviors on more diverse terrains, enhancing terrain adaptability for the controller. We conduct experiments in both simulation and real-world experiments in Unitree G1 robots. The results show that our method exhibits strong adaptability across various situations and terrains. Project website: https://ahc-humanoid.github.io.
KungfuBot: Physics-Based Humanoid Whole-Body Control for Learning Highly-Dynamic Skills
Jun 15, 2025Humanoid robots are promising to acquire various skills by imitating human behaviors. However, existing algorithms are only capable of tracking smooth, low-speed human motions, even with delicate reward and curriculum design. This paper presents a physics-based humanoid control framework, aiming to master highly-dynamic human behaviors such as Kungfu and dancing through multi-steps motion processing and adaptive motion tracking. For motion processing, we design a pipeline to extract, filter out, correct, and retarget motions, while ensuring compliance with physical constraints to the maximum extent. For motion imitation, we formulate a bi-level optimization problem to dynamically adjust the tracking accuracy tolerance based on the current tracking error, creating an adaptive curriculum mechanism. We further construct an asymmetric actor-critic framework for policy training. In experiments, we train whole-body control policies to imitate a set of highly-dynamic motions. Our method achieves significantly lower tracking errors than existing approaches and is successfully deployed on the Unitree G1 robot, demonstrating stable and expressive behaviors. The project page is https://kungfu-bot.github.io.
MoRE: Mixture of Residual Experts for Humanoid Lifelike Gaits Learning on Complex Terrains
Jun 12, 2025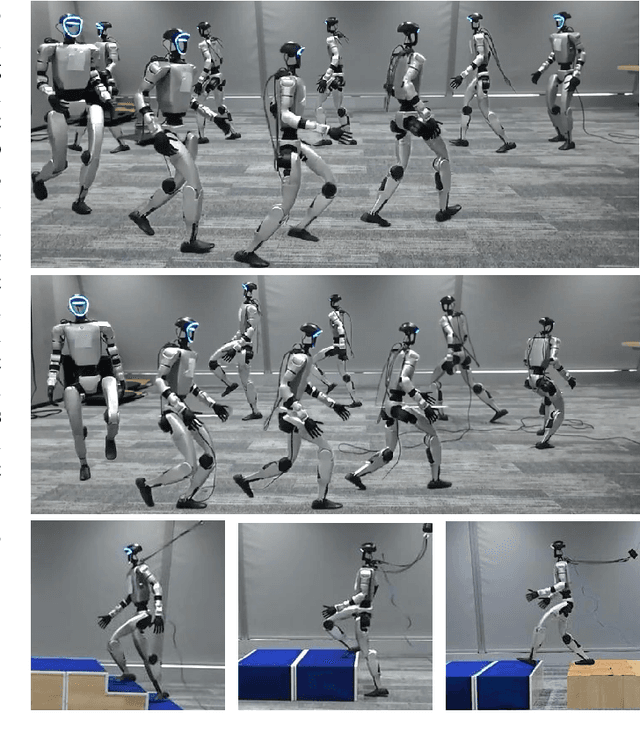
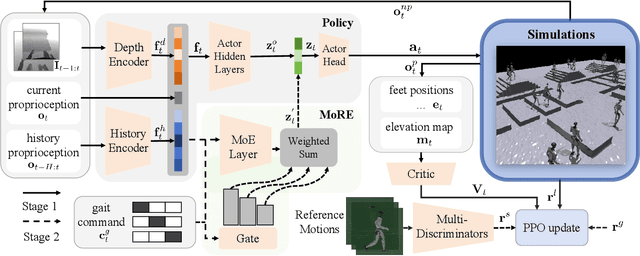
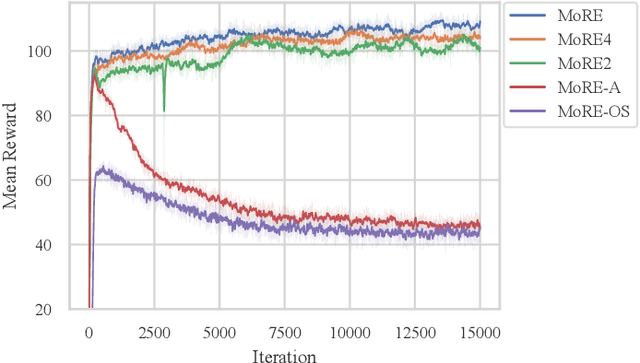
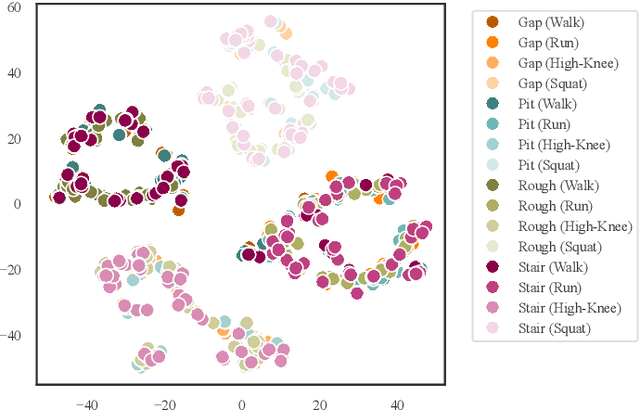
Humanoid robots have demonstrated robust locomotion capabilities using Reinforcement Learning (RL)-based approaches. Further, to obtain human-like behaviors, existing methods integrate human motion-tracking or motion prior in the RL framework. However, these methods are limited in flat terrains with proprioception only, restricting their abilities to traverse challenging terrains with human-like gaits. In this work, we propose a novel framework using a mixture of latent residual experts with multi-discriminators to train an RL policy, which is capable of traversing complex terrains in controllable lifelike gaits with exteroception. Our two-stage training pipeline first teaches the policy to traverse complex terrains using a depth camera, and then enables gait-commanded switching between human-like gait patterns. We also design gait rewards to adjust human-like behaviors like robot base height. Simulation and real-world experiments demonstrate that our framework exhibits exceptional performance in traversing complex terrains, and achieves seamless transitions between multiple human-like gait patterns.
Adversarial Locomotion and Motion Imitation for Humanoid Policy Learning
Apr 19, 2025Humans exhibit diverse and expressive whole-body movements. However, attaining human-like whole-body coordination in humanoid robots remains challenging, as conventional approaches that mimic whole-body motions often neglect the distinct roles of upper and lower body. This oversight leads to computationally intensive policy learning and frequently causes robot instability and falls during real-world execution. To address these issues, we propose Adversarial Locomotion and Motion Imitation (ALMI), a novel framework that enables adversarial policy learning between upper and lower body. Specifically, the lower body aims to provide robust locomotion capabilities to follow velocity commands while the upper body tracks various motions. Conversely, the upper-body policy ensures effective motion tracking when the robot executes velocity-based movements. Through iterative updates, these policies achieve coordinated whole-body control, which can be extended to loco-manipulation tasks with teleoperation systems. Extensive experiments demonstrate that our method achieves robust locomotion and precise motion tracking in both simulation and on the full-size Unitree H1 robot. Additionally, we release a large-scale whole-body motion control dataset featuring high-quality episodic trajectories from MuJoCo simulations deployable on real robots. The project page is https://almi-humanoid.github.io.
Benchmarking SLAM Algorithms in the Cloud: The SLAM Hive System
Jun 25, 2024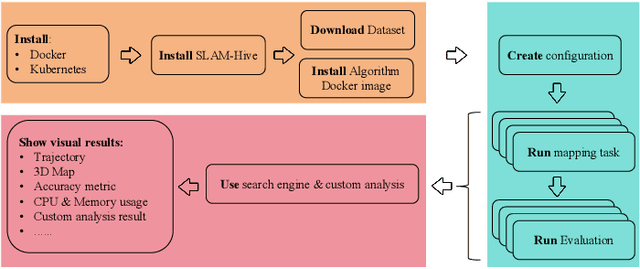
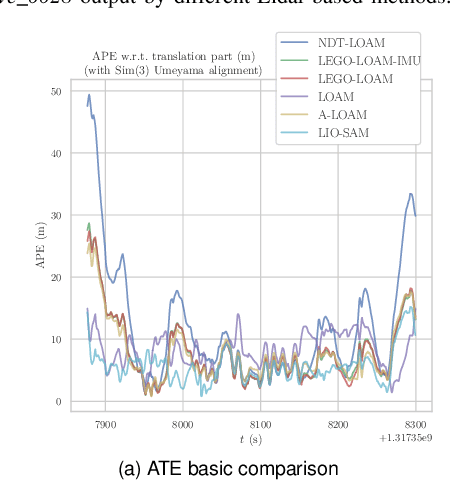
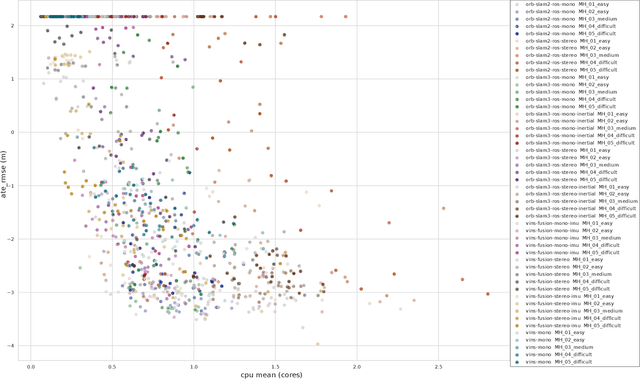
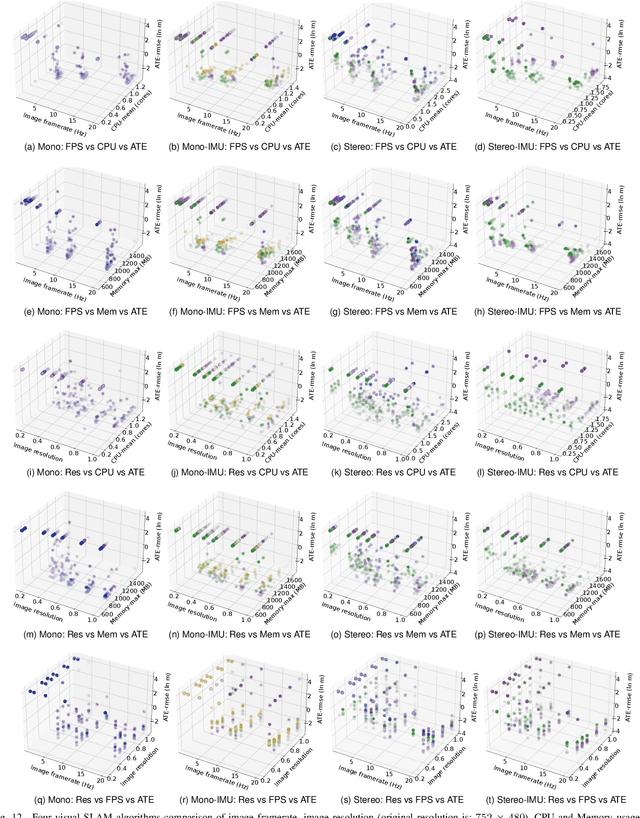
Evaluating the performance of Simultaneous Localization and Mapping (SLAM) algorithms is essential for scientists and users of robotic systems alike. But there are a multitude different permutations of possible options of hardware setups and algorithm configurations, as well as different datasets and algorithms, such that it is infeasible to thoroughly compare SLAM systems against the full state of the art. To solve that we present the SLAM Hive Benchmarking Suite, which is able to analyze SLAM algorithms in thousands of mapping runs, through its utilization of container technology and deployment in the cloud. This paper presents the architecture and open source implementation of SLAM Hive and compares it to existing efforts on SLAM evaluation. We perform mapping runs of many of the most popular visual and LiDAR based SLAM algorithms against commonly used datasets and show how SLAM Hive and then be used to conveniently analyze the results against various aspects. Through this we envision that SLAM Hive can become an essential tool for proper comparisons and evaluations of SLAM algorithms and thus drive the scientific development in the research on SLAM. The open source software as well as a demo to show the live analysis of 100s of mapping runs can be found on our SLAM Hive website.