 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeARGaze: Autoregressive Transformers for Online Egocentric Gaze Estimation
Feb 04, 2026Online egocentric gaze estimation predicts where a camera wearer is looking from first-person video using only past and current frames, a task essential for augmented reality and assistive technologies. Unlike third-person gaze estimation, this setting lacks explicit head or eye signals, requiring models to infer current visual attention from sparse, indirect cues such as hand-object interactions and salient scene content. We observe that gaze exhibits strong temporal continuity during goal-directed activities: knowing where a person looked recently provides a powerful prior for predicting where they look next. Inspired by vision-conditioned autoregressive decoding in vision-language models, we propose ARGaze, which reformulates gaze estimation as sequential prediction: at each timestep, a transformer decoder predicts current gaze by conditioning on (i) current visual features and (ii) a fixed-length Gaze Context Window of recent gaze target estimates. This design enforces causality and enables bounded-resource streaming inference. We achieve state-of-the-art performance across multiple egocentric benchmarks under online evaluation, with extensive ablations validating that autoregressive modeling with bounded gaze history is critical for robust prediction. We will release our source code and pre-trained models.
HAAF: Hierarchical Adaptation and Alignment of Foundation Models for Few-Shot Pathology Anomaly Detection
Jan 24, 2026Precision pathology relies on detecting fine-grained morphological abnormalities within specific Regions of Interest (ROIs), as these local, texture-rich cues - rather than global slide contexts - drive expert diagnostic reasoning. While Vision-Language (V-L) models promise data efficiency by leveraging semantic priors, adapting them faces a critical Granularity Mismatch, where generic representations fail to resolve such subtle defects. Current adaptation methods often treat modalities as independent streams, failing to ground semantic prompts in ROI-specific visual contexts. To bridge this gap, we propose the Hierarchical Adaptation and Alignment Framework (HAAF). At its core is a novel Cross-Level Scaled Alignment (CLSA) mechanism that enforces a sequential calibration order: visual features first inject context into text prompts to generate content-adaptive descriptors, which then spatially guide the visual encoder to spotlight anomalies. Additionally, a dual-branch inference strategy integrates semantic scores with geometric prototypes to ensure stability in few-shot settings. Experiments on four benchmarks show HAAF significantly outperforms state-of-the-art methods and effectively scales with domain-specific backbones (e.g., CONCH) in low-resource scenarios.
From Pixel to Mask: A Survey of Out-of-Distribution Segmentation
Aug 14, 2025Out-of-distribution (OoD) detection and segmentation have attracted growing attention as concerns about AI security rise. Conventional OoD detection methods identify the existence of OoD objects but lack spatial localization, limiting their usefulness in downstream tasks. OoD segmentation addresses this limitation by localizing anomalous objects at pixel-level granularity. This capability is crucial for safety-critical applications such as autonomous driving, where perception modules must not only detect but also precisely segment OoD objects, enabling targeted control actions and enhancing overall system robustness. In this survey, we group current OoD segmentation approaches into four categories: (i) test-time OoD segmentation, (ii) outlier exposure for supervised training, (iii) reconstruction-based methods, (iv) and approaches that leverage powerful models. We systematically review recent advances in OoD segmentation for autonomous-driving scenarios, identify emerging challenges, and discuss promising future research directions.
Interpretable Multimodal Learning for Tumor Protein-Metal Binding: Progress, Challenges, and Perspectives
Apr 04, 2025In cancer therapeutics, protein-metal binding mechanisms critically govern drug pharmacokinetics and targeting efficacy, thereby fundamentally shaping the rational design of anticancer metallodrugs. While conventional laboratory methods used to study such mechanisms are often costly, low throughput, and limited in capturing dynamic biological processes, machine learning (ML) has emerged as a promising alternative. Despite increasing efforts to develop protein-metal binding datasets and ML algorithms, the application of ML in tumor protein-metal binding remains limited. Key challenges include a shortage of high-quality, tumor-specific datasets, insufficient consideration of multiple data modalities, and the complexity of interpreting results due to the ''black box'' nature of complex ML models. This paper summarizes recent progress and ongoing challenges in using ML to predict tumor protein-metal binding, focusing on data, modeling, and interpretability. We present multimodal protein-metal binding datasets and outline strategies for acquiring, curating, and preprocessing them for training ML models. Moreover, we explore the complementary value provided by different data modalities and examine methods for their integration. We also review approaches for improving model interpretability to support more trustworthy decisions in cancer research. Finally, we offer our perspective on research opportunities and propose strategies to address the scarcity of tumor protein data and the limited number of predictive models for tumor protein-metal binding. We also highlight two promising directions for effective metal-based drug design: integrating protein-protein interaction data to provide structural insights into metal-binding events and predicting structural changes in tumor proteins after metal binding.
H2ST: Hierarchical Two-Sample Tests for Continual Out-of-Distribution Detection
Mar 19, 2025



Task Incremental Learning (TIL) is a specialized form of Continual Learning (CL) in which a model incrementally learns from non-stationary data streams. Existing TIL methodologies operate under the closed-world assumption, presuming that incoming data remains in-distribution (ID). However, in an open-world setting, incoming samples may originate from out-of-distribution (OOD) sources, with their task identities inherently unknown. Continually detecting OOD samples presents several challenges for current OOD detection methods: reliance on model outputs leads to excessive dependence on model performance, selecting suitable thresholds is difficult, hindering real-world deployment, and binary ID/OOD classification fails to provide task-level identification. To address these issues, we propose a novel continual OOD detection method called the Hierarchical Two-sample Tests (H2ST). H2ST eliminates the need for threshold selection through hypothesis testing and utilizes feature maps to better exploit model capabilities without excessive dependence on model performance. The proposed hierarchical architecture enables task-level detection with superior performance and lower overhead compared to non-hierarchical classifier two-sample tests. Extensive experiments and analysis validate the effectiveness of H2ST in open-world TIL scenarios and its superiority to the existing methods. Code is available at \href{https://github.com/YuhangLiuu/H2ST}{https://github.com/YuhangLiuu/H2ST}.
LLM-PQA: LLM-enhanced Prediction Query Answering
Sep 02, 2024



The advent of Large Language Models (LLMs) provides an opportunity to change the way queries are processed, moving beyond the constraints of conventional SQL-based database systems. However, using an LLM to answer a prediction query is still challenging, since an external ML model has to be employed and inference has to be performed in order to provide an answer. This paper introduces LLM-PQA, a novel tool that addresses prediction queries formulated in natural language. LLM-PQA is the first to combine the capabilities of LLMs and retrieval-augmented mechanism for the needs of prediction queries by integrating data lakes and model zoos. This integration provides users with access to a vast spectrum of heterogeneous data and diverse ML models, facilitating dynamic prediction query answering. In addition, LLM-PQA can dynamically train models on demand, based on specific query requirements, ensuring reliable and relevant results even when no pre-trained model in a model zoo, available for the task.
Segment Every Out-of-Distribution Object
Nov 27, 2023



Semantic segmentation models, while effective for in-distribution categories, face challenges in real-world deployment due to encountering out-of-distribution (OoD) objects. Detecting these OoD objects is crucial for safety-critical applications. Existing methods rely on anomaly scores, but choosing a suitable threshold for generating masks presents difficulties and can lead to fragmentation and inaccuracy. This paper introduces a method to convert anomaly Score To segmentation Mask, called S2M, a simple and effective framework for OoD detection in semantic segmentation. Unlike assigning anomaly scores to pixels, S2M directly segments the entire OoD object. By transforming anomaly scores into prompts for a promptable segmentation model, S2M eliminates the need for threshold selection. Extensive experiments demonstrate that S2M outperforms the state-of-the-art by approximately 10\% in IoU and 30\% in mean F1 score, on average, across various benchmarks including Fishyscapes, Segment-Me-If-You-Can, and RoadAnomaly datasets.
Object Servoing of Differential-Drive Robots
Nov 10, 2021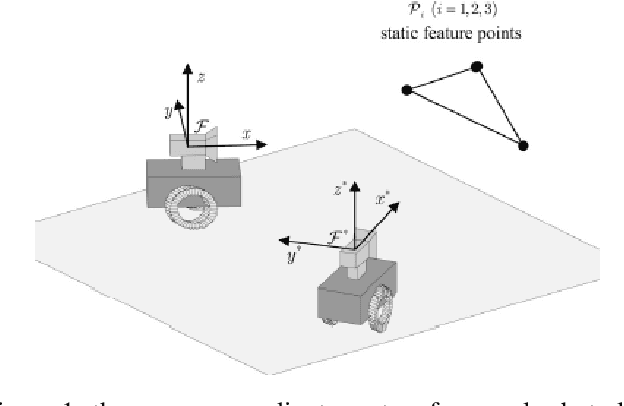
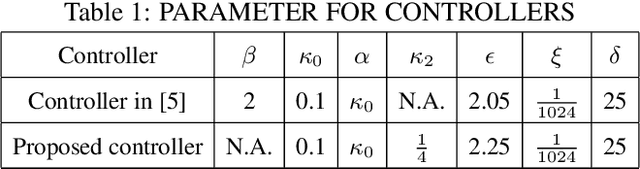
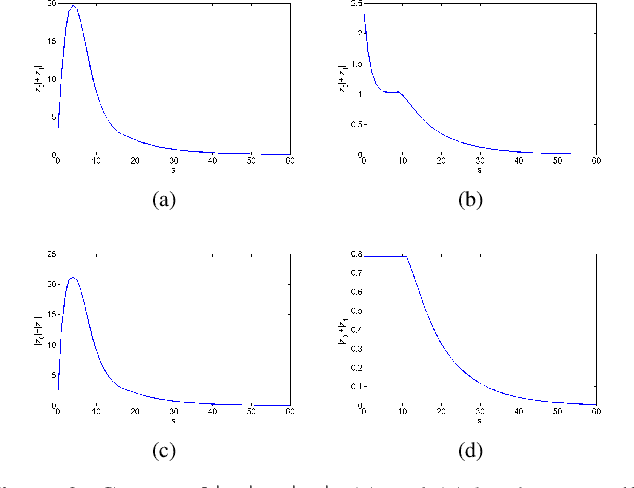
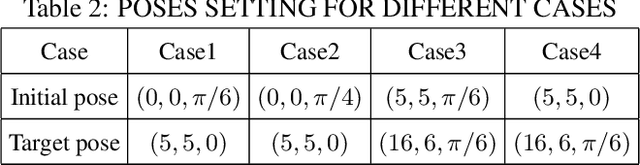
Due to possibly changing pose of a movable object and nonholonomic constraint of a differential-drive robot, it is challenging to design an object servoing scheme for the differential-drive robot to asymptotically park at a predefined relative pose to the movable object. In this paper, a novel object servoing scheme is designed for the differential-drive robots. Each on-line relative pose is first estimated by using feature points of the moveable object and it serves as the input of an object servoing friendly parking controller. The linear velocity and angular velocity are then determined by the parking controller. Experimental results validate the performance of the proposed object servoing scheme. Due to its low on-line computational cost, the proposed scheme can be applied for last mile delivery of differential-drive robots to movable objects.
Deep reinforcement learning for RAN optimization and control
Nov 09, 2020
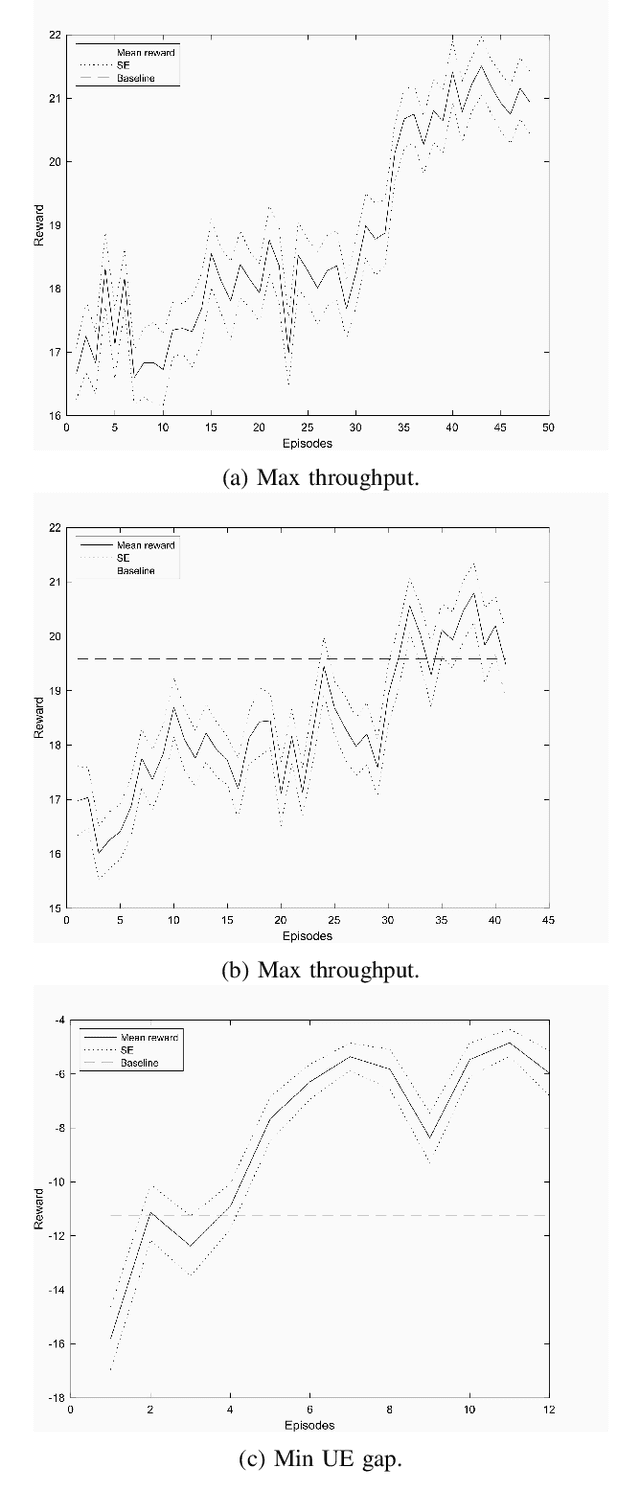
Due to the high variability of the traffic in the radio access network (RAN), fixed network configurations are not flexible to achieve the optimal performance. Our vendors provide several settings of the eNodeB to optimize the RAN performance, such as media access control scheduler, loading balance, etc. But the detailed mechanisms of the eNodeB configurations are usually very complicated and not disclosed, not to mention the large KPIs space needed to be considered. These make constructing simulator, offline tuning, or rule-based solutions difficult. We aim to build an intelligent controller without strong assumption or domain knowledge about the RAN and can run for 24/7 without supervision. To achieve this goal, we first build a closed-loop control testbed RAN in a lab environment with one eNodeB provided by one of the largest wireless vendors and four smartphones. Next, we build a double Q network agent that is trained with the live feedbacks of the key performance indicators from the RAN. Our work proved the effectiveness of applying deep reinforcement learning to improve network performance in a real RAN network environment.