 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiffusion Models for Unsupervised Anomaly Detection in Fetal Brain Ultrasound
Jul 21, 2024Ultrasonography is an essential tool in mid-pregnancy for assessing fetal development, appreciated for its non-invasive and real-time imaging capabilities. Yet, the interpretation of ultrasound images is often complicated by acoustic shadows, speckle noise, and other artifacts that obscure crucial diagnostic details. To address these challenges, our study presents a novel unsupervised anomaly detection framework specifically designed for fetal ultrasound imaging. This framework incorporates gestational age filtering, precise identification of fetal standard planes, and targeted segmentation of brain regions to enhance diagnostic accuracy. Furthermore, we introduce the use of denoising diffusion probabilistic models in this context, marking a significant innovation in detecting previously unrecognized anomalies. We rigorously evaluated the framework using various diffusion-based anomaly detection methods, noise types, and noise levels. Notably, AutoDDPM emerged as the most effective, achieving an area under the precision-recall curve of 79.8\% in detecting anomalies. This advancement holds promise for improving the tools available for nuanced and effective prenatal diagnostics.
Unsupervised Analysis of Alzheimer's Disease Signatures using 3D Deformable Autoencoders
Jul 04, 2024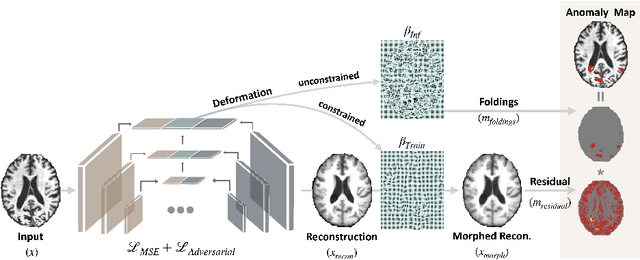
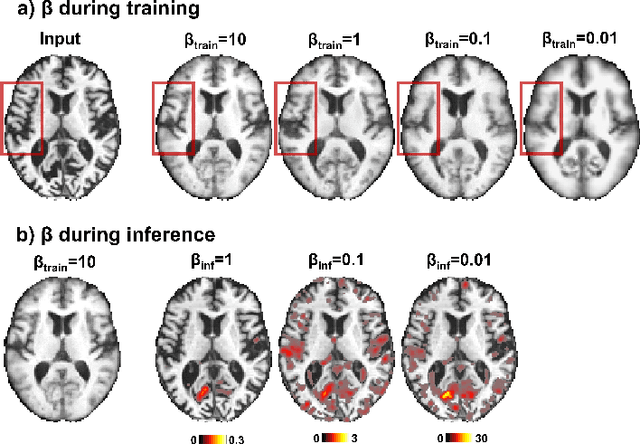
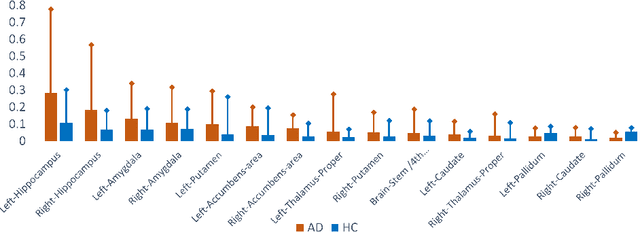
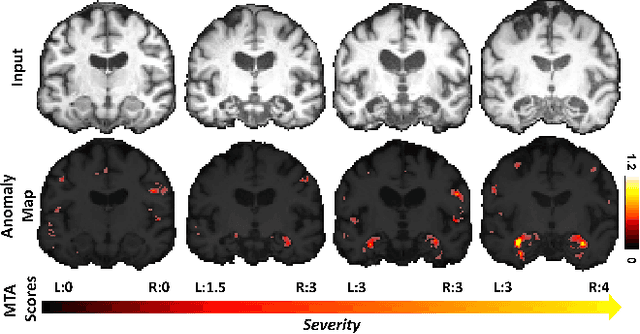
With the increasing incidence of neurodegenerative diseases such as Alzheimer's Disease (AD), there is a need for further research that enhances detection and monitoring of the diseases. We present MORPHADE (Morphological Autoencoders for Alzheimer's Disease Detection), a novel unsupervised learning approach which uses deformations to allow the analysis of 3D T1-weighted brain images. To the best of our knowledge, this is the first use of deformations with deep unsupervised learning to not only detect, but also localize and assess the severity of structural changes in the brain due to AD. We obtain markedly higher anomaly scores in clinically important areas of the brain in subjects with AD compared to healthy controls, showcasing that our method is able to effectively locate AD-related atrophy. We additionally observe a visual correlation between the severity of atrophy highlighted in our anomaly maps and medial temporal lobe atrophy scores evaluated by a clinical expert. Finally, our method achieves an AUROC of 0.80 in detecting AD, out-performing several supervised and unsupervised baselines. We believe our framework shows promise as a tool towards improved understanding, monitoring and detection of AD. To support further research and application, we have made our code publicly available at github.com/ci-ber/MORPHADE.
Robotic-assisted Ultrasound for Fetal Imaging: Evolution from Single-arm to Dual-arm System
Apr 10, 2019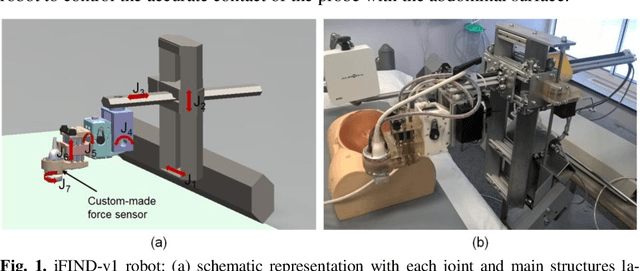
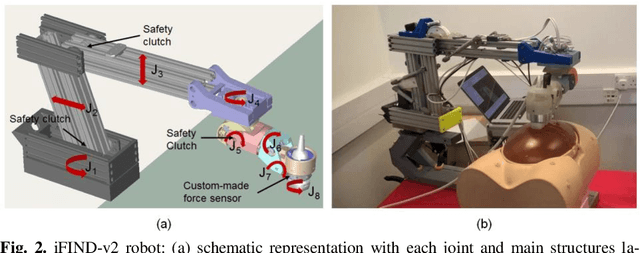
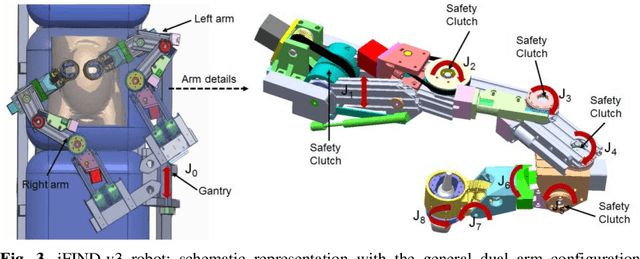
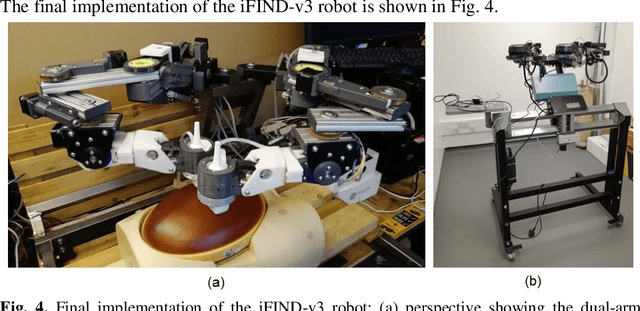
The development of robotic-assisted extracorporeal ultrasound systems has a long history and a number of projects have been proposed since the 1990s focusing on different technical aspects. These aim to resolve the deficiencies of on-site manual manipulation of hand-held ultrasound probes. This paper presents the recent ongoing developments of a series of bespoke robotic systems, including both single-arm and dual-arm versions, for a project known as intelligent Fetal Imaging and Diagnosis (iFIND). After a brief review of the development history of the extracorporeal ultrasound robotic system used for fetal and abdominal examinations, the specific aim of the iFIND robots, the design evolution, the implementation details of each version, and the initial clinical feedback of the iFIND robot series are presented. Based on the preliminary testing of these newly-proposed robots on 42 volunteers, the successful and re-liable working of the mechatronic systems were validated. Analysis of a participant questionnaire indicates a comfortable scanning experience for the volunteers and a good acceptance rate to being scanned by the robots.
Weakly Supervised Estimation of Shadow Confidence Maps in Ultrasound Imaging
Nov 21, 2018
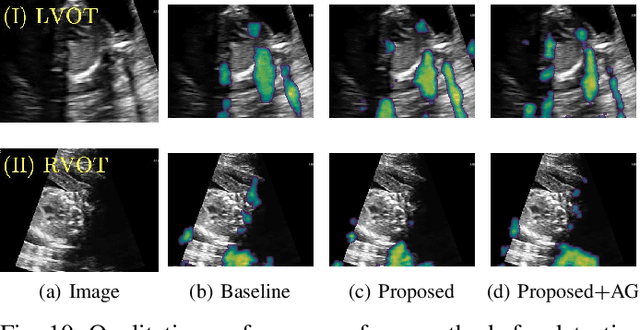
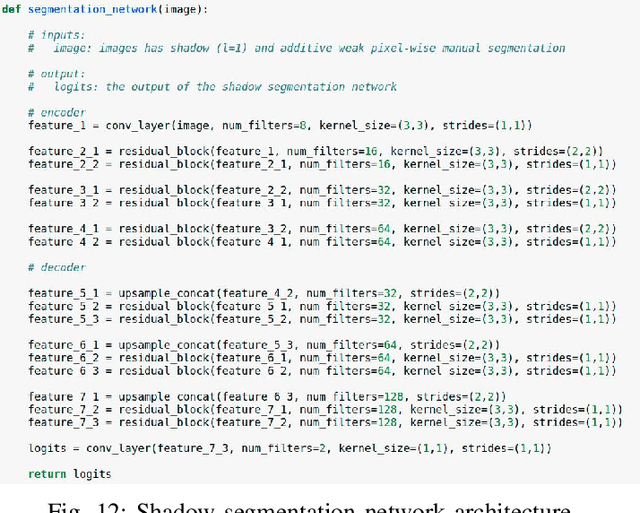
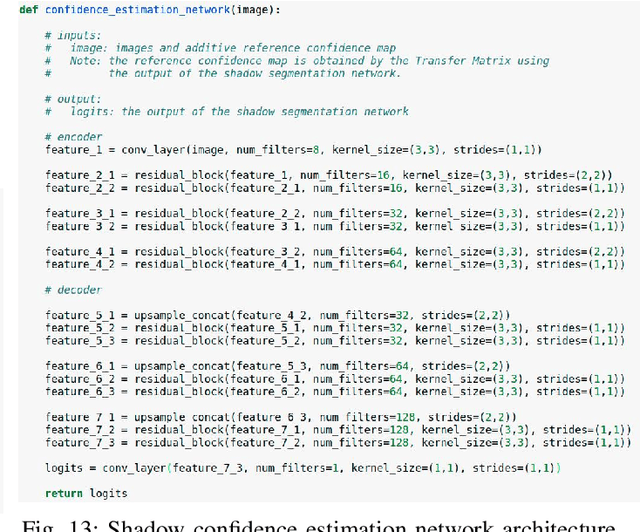
Detecting acoustic shadows in ultrasound images is important in many clinical and engineering applications. Real-time feedback of acoustic shadows can guide sonographers to a standardized diagnostic viewing plane with minimal artifacts and can provide additional information for other automatic image analysis algorithms. However, automatically detecting shadow regions is challenging because pixel-wise annotation of acoustic shadows is subjective and time consuming. In this paper we propose a weakly supervised method for automatic confidence estimation of acoustic shadow regions, which is able to generate a dense shadow-focused confidence map. During training, a multi-task module for shadow segmentation is built to learn general shadow features according based image-level annotations as well as a small number of coarse pixel-wise shadow annotations. A transfer function is then established to extend the binary shadow segmentation to a reference confidence map. In addition, a confidence estimation network is proposed to learn the mapping between input images and the reference confidence maps. This confidence estimation network is able to predict shadow confidence maps directly from input images during inference. We evaluate DICE, soft DICE, recall, precision, mean squared error and inter-class correlation to verify the effectiveness of our method. Our method outperforms the state-of-the-art qualitatively and quantitatively. We further demonstrate the applicability of our method by integrating shadow confidence maps into tasks such as ultrasound image classification, multi-view image fusion and automated biometric measurements.
EchoFusion: Tracking and Reconstruction of Objects in 4D Freehand Ultrasound Imaging without External Trackers
Jul 19, 2018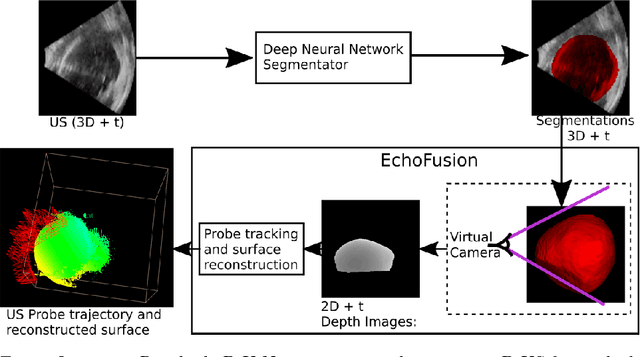
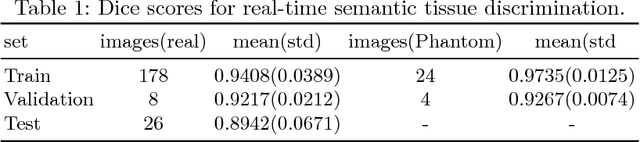
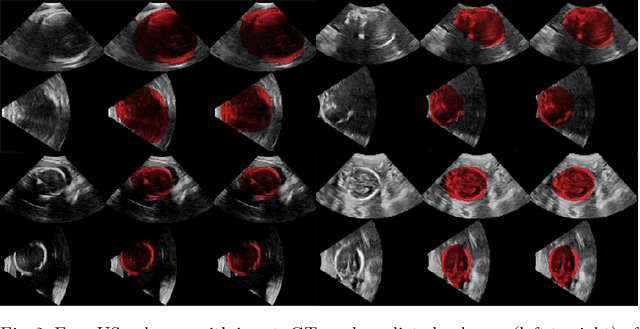
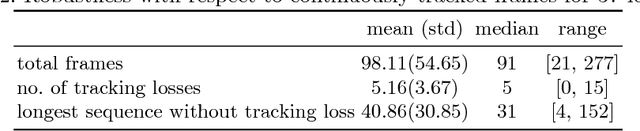
Ultrasound (US) is the most widely used fetal imaging technique. However, US images have limited capture range, and suffer from view dependent artefacts such as acoustic shadows. Compounding of overlapping 3D US acquisitions into a high-resolution volume can extend the field of view and remove image artefacts, which is useful for retrospective analysis including population based studies. However, such volume reconstructions require information about relative transformations between probe positions from which the individual volumes were acquired. In prenatal US scans, the fetus can move independently from the mother, making external trackers such as electromagnetic or optical tracking unable to track the motion between probe position and the moving fetus. We provide a novel methodology for image-based tracking and volume reconstruction by combining recent advances in deep learning and simultaneous localisation and mapping (SLAM). Tracking semantics are established through the use of a Residual 3D U-Net and the output is fed to the SLAM algorithm. As a proof of concept, experiments are conducted on US volumes taken from a whole body fetal phantom, and from the heads of real fetuses. For the fetal head segmentation, we also introduce a novel weak annotation approach to minimise the required manual effort for ground truth annotation. We evaluate our method qualitatively, and quantitatively with respect to tissue discrimination accuracy and tracking robustness.