 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeALAS: Adaptive Long-Horizon Action Synthesis via Async-pathway Stream Disentanglement
Apr 22, 2026Long-Horizon (LH) tasks in Human-Scene Interaction (HSI) are complex multi-step tasks that require continuous planning, sequential decision-making, and extended execution across domains to achieve the final goal. However, existing methods heavily rely on skill chaining by concatenating pre-trained subtasks, with environment observations and self-state tightly coupled, lacking the ability to generalize to new combinations of environments and skills, failing to complete various LH tasks across domains. To solve this problem, this paper presents ALAS, a cross-domain learning framework for LH tasks via biologically inspired dual-stream disentanglement. Inspired by the brain's "where-what" dual pathway mechanism, ALAS comprises two core modules: i) an environment learning module for spatial understanding, which captures object functions, spatial relationships, and scene semantics, achieving cross-domain transfer through complete environment-self disentanglement; ii) a skill learning module for task execution, which processes self-state information including joint degrees of freedom and motor patterns, enabling cross-skill transfer through independent motor pattern encoding. We conducted extensive experiments on various LH tasks in HSI scenes. Compared with existing methods, ALAS can achieve an average subtasks success rate improvement of 23\% and average execution efficiency improvement of 29\%.
Self-evolving Embodied AI
Feb 04, 2026Embodied Artificial Intelligence (AI) is an intelligent system formed by agents and their environment through active perception, embodied cognition, and action interaction. Existing embodied AI remains confined to human-crafted setting, in which agents are trained on given memory and construct models for given tasks, enabling fixed embodiments to interact with relatively static environments. Such methods fail in in-the-wild setting characterized by variable embodiments and dynamic open environments. This paper introduces self-evolving embodied AI, a new paradigm in which agents operate based on their changing state and environment with memory self-updating, task self-switching, environment self-prediction, embodiment self-adaptation, and model self-evolution, aiming to achieve continually adaptive intelligence with autonomous evolution. Specifically, we present the definition, framework, components, and mechanisms of self-evolving embodied AI, systematically review state-of-the-art works for realized components, discuss practical applications, and point out future research directions. We believe that self-evolving embodied AI enables agents to autonomously learn and interact with environments in a human-like manner and provide a new perspective toward general artificial intelligence.
MetaWorld: Skill Transfer and Composition in a Hierarchical World Model for Grounding High-Level Instructions
Jan 24, 2026Humanoid robot loco-manipulation remains constrained by the semantic-physical gap. Current methods face three limitations: Low sample efficiency in reinforcement learning, poor generalization in imitation learning, and physical inconsistency in VLMs. We propose MetaWorld, a hierarchical world model that integrates semantic planning and physical control via expert policy transfer. The framework decouples tasks into a VLM-driven semantic layer and a latent dynamics model operating in a compact state space. Our dynamic expert selection and motion prior fusion mechanism leverages a pre-trained multi-expert policy library as transferable knowledge, enabling efficient online adaptation via a two-stage framework. VLMs serve as semantic interfaces, mapping instructions to executable skills and bypassing symbol grounding. Experiments on Humanoid-Bench show MetaWorld outperforms world model-based RL in task completion and motion coherence. Our code will be found at https://anonymous.4open.science/r/metaworld-2BF4/
PMMD: A pose-guided multi-view multi-modal diffusion for person generation
Dec 17, 2025



Generating consistent human images with controllable pose and appearance is essential for applications in virtual try on, image editing, and digital human creation. Current methods often suffer from occlusions, garment style drift, and pose misalignment. We propose Pose-guided Multi-view Multimodal Diffusion (PMMD), a diffusion framework that synthesizes photorealistic person images conditioned on multi-view references, pose maps, and text prompts. A multimodal encoder jointly models visual views, pose features, and semantic descriptions, which reduces cross modal discrepancy and improves identity fidelity. We further design a ResCVA module to enhance local detail while preserving global structure, and a cross modal fusion module that integrates image semantics with text throughout the denoising pipeline. Experiments on the DeepFashion MultiModal dataset show that PMMD outperforms representative baselines in consistency, detail preservation, and controllability. Project page and code are available at https://github.com/ZANMANGLOOPYE/PMMD.
DETACH: Cross-domain Learning for Long-Horizon Tasks via Mixture of Disentangled Experts
Aug 11, 2025Long-Horizon (LH) tasks in Human-Scene Interaction (HSI) are complex multi-step tasks that require continuous planning, sequential decision-making, and extended execution across domains to achieve the final goal. However, existing methods heavily rely on skill chaining by concatenating pre-trained subtasks, with environment observations and self-state tightly coupled, lacking the ability to generalize to new combinations of environments and skills, failing to complete various LH tasks across domains. To solve this problem, this paper presents DETACH, a cross-domain learning framework for LH tasks via biologically inspired dual-stream disentanglement. Inspired by the brain's "where-what" dual pathway mechanism, DETACH comprises two core modules: i) an environment learning module for spatial understanding, which captures object functions, spatial relationships, and scene semantics, achieving cross-domain transfer through complete environment-self disentanglement; ii) a skill learning module for task execution, which processes self-state information including joint degrees of freedom and motor patterns, enabling cross-skill transfer through independent motor pattern encoding. We conducted extensive experiments on various LH tasks in HSI scenes. Compared with existing methods, DETACH can achieve an average subtasks success rate improvement of 23% and average execution efficiency improvement of 29%.
EvoAgent: Agent Autonomous Evolution with Continual World Model for Long-Horizon Tasks
Feb 09, 2025



Completing Long-Horizon (LH) tasks in open-ended worlds is an important yet difficult problem for embodied agents. Existing approaches suffer from two key challenges: (1) they heavily rely on experiences obtained from human-created data or curricula, lacking the ability to continuously update multimodal experiences, and (2) they may encounter catastrophic forgetting issues when faced with new tasks, lacking the ability to continuously update world knowledge. To solve these challenges, this paper presents EvoAgent, an autonomous-evolving agent with a continual World Model (WM), which can autonomously complete various LH tasks across environments through self-planning, self-control, and self-reflection, without human intervention. Our proposed EvoAgent contains three modules, i.e., i) the memory-driven planner which uses an LLM along with the WM and interaction memory, to convert LH tasks into executable sub-tasks; ii) the WM-guided action controller which leverages WM to generate low-level actions and incorporates a self-verification mechanism to update multimodal experiences; iii) the experience-inspired reflector which implements a two-stage curriculum learning algorithm to select experiences for task-adaptive WM updates. Moreover, we develop a continual World Model for EvoAgent, which can continuously update the multimodal experience pool and world knowledge through closed-loop dynamics. We conducted extensive experiments on Minecraft, compared with existing methods, EvoAgent can achieve an average success rate improvement of 105% and reduce ineffective actions by more than 6x.
JAQ: Joint Efficient Architecture Design and Low-Bit Quantization with Hardware-Software Co-Exploration
Jan 09, 2025



The co-design of neural network architectures, quantization precisions, and hardware accelerators offers a promising approach to achieving an optimal balance between performance and efficiency, particularly for model deployment on resource-constrained edge devices. In this work, we propose the JAQ Framework, which jointly optimizes the three critical dimensions. However, effectively automating the design process across the vast search space of those three dimensions poses significant challenges, especially when pursuing extremely low-bit quantization. Specifical, the primary challenges include: (1) Memory overhead in software-side: Low-precision quantization-aware training can lead to significant memory usage due to storing large intermediate features and latent weights for back-propagation, potentially causing memory exhaustion. (2) Search time-consuming in hardware-side: The discrete nature of hardware parameters and the complex interplay between compiler optimizations and individual operators make the accelerator search time-consuming. To address these issues, JAQ mitigates the memory overhead through a channel-wise sparse quantization (CSQ) scheme, selectively applying quantization to the most sensitive components of the model during optimization. Additionally, JAQ designs BatchTile, which employs a hardware generation network to encode all possible tiling modes, thereby speeding up the search for the optimal compiler mapping strategy. Extensive experiments demonstrate the effectiveness of JAQ, achieving approximately 7% higher Top-1 accuracy on ImageNet compared to previous methods and reducing the hardware search time per iteration to 0.15 seconds.
TCDformer-based Momentum Transfer Model for Long-term Sports Prediction
Sep 16, 2024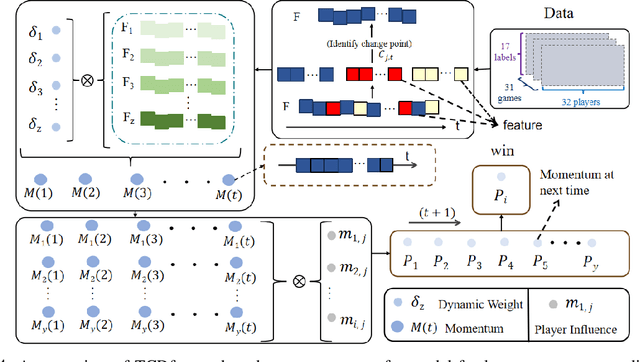
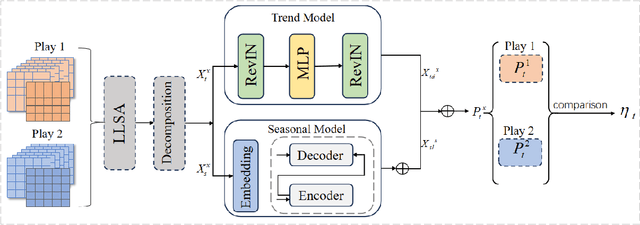
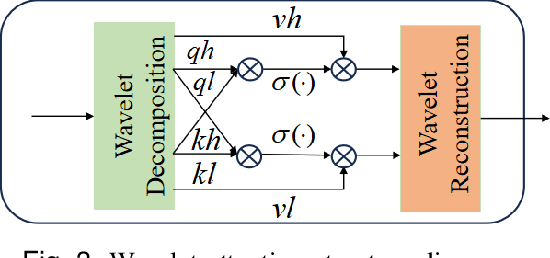

Accurate sports prediction is a crucial skill for professional coaches, which can assist in developing effective training strategies and scientific competition tactics. Traditional methods often use complex mathematical statistical techniques to boost predictability, but this often is limited by dataset scale and has difficulty handling long-term predictions with variable distributions, notably underperforming when predicting point-set-game multi-level matches. To deal with this challenge, this paper proposes TM2, a TCDformer-based Momentum Transfer Model for long-term sports prediction, which encompasses a momentum encoding module and a prediction module based on momentum transfer. TM2 initially encodes momentum in large-scale unstructured time series using the local linear scaling approximation (LLSA) module. Then it decomposes the reconstructed time series with momentum transfer into trend and seasonal components. The final prediction results are derived from the additive combination of a multilayer perceptron (MLP) for predicting trend components and wavelet attention mechanisms for seasonal components. Comprehensive experimental results show that on the 2023 Wimbledon men's tournament datasets, TM2 significantly surpasses existing sports prediction models in terms of performance, reducing MSE by 61.64% and MAE by 63.64%.
U2UData: A Large-scale Cooperative Perception Dataset for Swarm UAVs Autonomous Flight
Aug 05, 2024
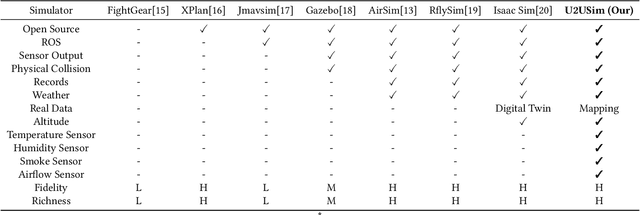

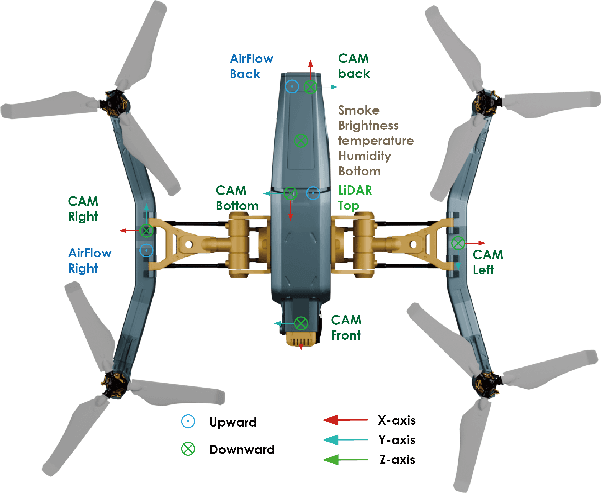
Modern perception systems for autonomous flight are sensitive to occlusion and have limited long-range capability, which is a key bottleneck in improving low-altitude economic task performance. Recent research has shown that the UAV-to-UAV (U2U) cooperative perception system has great potential to revolutionize the autonomous flight industry. However, the lack of a large-scale dataset is hindering progress in this area. This paper presents U2UData, the first large-scale cooperative perception dataset for swarm UAVs autonomous flight. The dataset was collected by three UAVs flying autonomously in the U2USim, covering a 9 km$^2$ flight area. It comprises 315K LiDAR frames, 945K RGB and depth frames, and 2.41M annotated 3D bounding boxes for 3 classes. It also includes brightness, temperature, humidity, smoke, and airflow values covering all flight routes. U2USim is the first real-world mapping swarm UAVs simulation environment. It takes Yunnan Province as the prototype and includes 4 terrains, 7 weather conditions, and 8 sensor types. U2UData introduces two perception tasks: cooperative 3D object detection and cooperative 3D object tracking. This paper provides comprehensive benchmarks of recent cooperative perception algorithms on these tasks.
Multi-weather Cross-view Geo-localization Using Denoising Diffusion Models
Aug 05, 2024Cross-view geo-localization in GNSS-denied environments aims to determine an unknown location by matching drone-view images with the correct geo-tagged satellite-view images from a large gallery. Recent research shows that learning discriminative image representations under specific weather conditions can significantly enhance performance. However, the frequent occurrence of unseen extreme weather conditions hinders progress. This paper introduces MCGF, a Multi-weather Cross-view Geo-localization Framework designed to dynamically adapt to unseen weather conditions. MCGF establishes a joint optimization between image restoration and geo-localization using denoising diffusion models. For image restoration, MCGF incorporates a shared encoder and a lightweight restoration module to help the backbone eliminate weather-specific information. For geo-localization, MCGF uses EVA-02 as a backbone for feature extraction, with cross-entropy loss for training and cosine distance for testing. Extensive experiments on University160k-WX demonstrate that MCGF achieves competitive results for geo-localization in varying weather conditions.