 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeU2UData: A Large-scale Cooperative Perception Dataset for Swarm UAVs Autonomous Flight
Paper and Code
Aug 05, 2024
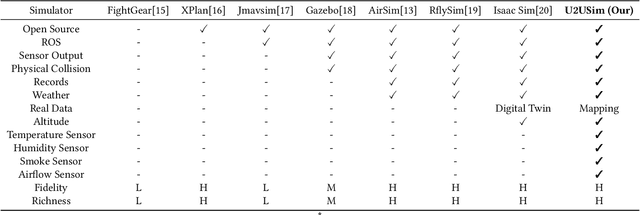

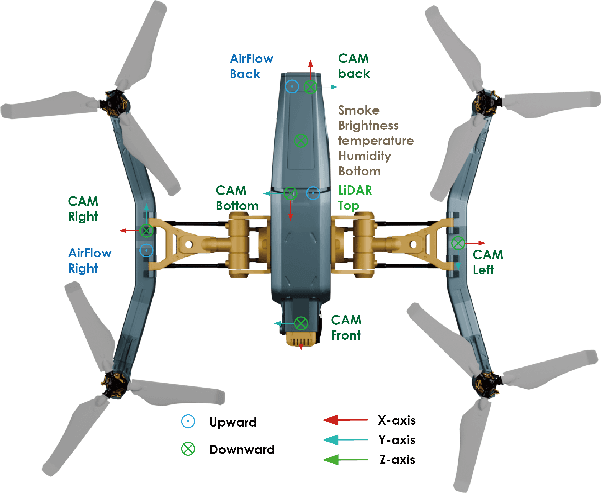
Modern perception systems for autonomous flight are sensitive to occlusion and have limited long-range capability, which is a key bottleneck in improving low-altitude economic task performance. Recent research has shown that the UAV-to-UAV (U2U) cooperative perception system has great potential to revolutionize the autonomous flight industry. However, the lack of a large-scale dataset is hindering progress in this area. This paper presents U2UData, the first large-scale cooperative perception dataset for swarm UAVs autonomous flight. The dataset was collected by three UAVs flying autonomously in the U2USim, covering a 9 km$^2$ flight area. It comprises 315K LiDAR frames, 945K RGB and depth frames, and 2.41M annotated 3D bounding boxes for 3 classes. It also includes brightness, temperature, humidity, smoke, and airflow values covering all flight routes. U2USim is the first real-world mapping swarm UAVs simulation environment. It takes Yunnan Province as the prototype and includes 4 terrains, 7 weather conditions, and 8 sensor types. U2UData introduces two perception tasks: cooperative 3D object detection and cooperative 3D object tracking. This paper provides comprehensive benchmarks of recent cooperative perception algorithms on these tasks.