 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModel editing for distribution shifts in uranium oxide morphological analysis
Jul 22, 2024

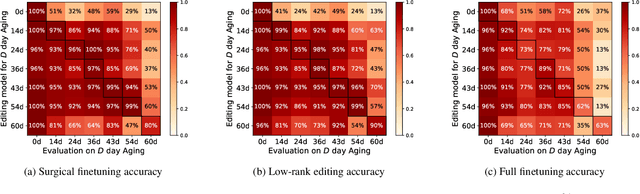
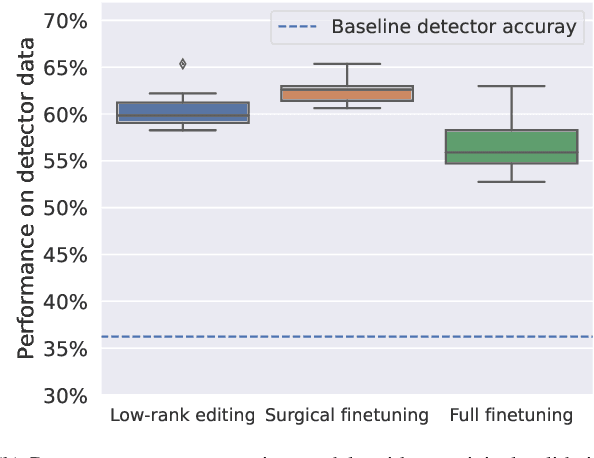
Deep learning still struggles with certain kinds of scientific data. Notably, pretraining data may not provide coverage of relevant distribution shifts (e.g., shifts induced via the use of different measurement instruments). We consider deep learning models trained to classify the synthesis conditions of uranium ore concentrates (UOCs) and show that model editing is particularly effective for improving generalization to distribution shifts common in this domain. In particular, model editing outperforms finetuning on two curated datasets comprising of micrographs taken of U$_{3}$O$_{8}$ aged in humidity chambers and micrographs acquired with different scanning electron microscopes, respectively.
Resilient Control of Networked Microgrids using Vertical Federated Reinforcement Learning: Designs and Real-Time Test-Bed Validations
Nov 21, 2023



Improving system-level resiliency of networked microgrids is an important aspect with increased population of inverter-based resources (IBRs). This paper (1) presents resilient control design in presence of adversarial cyber-events, and proposes a novel federated reinforcement learning (Fed-RL) approach to tackle (a) model complexities, unknown dynamical behaviors of IBR devices, (b) privacy issues regarding data sharing in multi-party-owned networked grids, and (2) transfers learned controls from simulation to hardware-in-the-loop test-bed, thereby bridging the gap between simulation and real world. With these multi-prong objectives, first, we formulate a reinforcement learning (RL) training setup generating episodic trajectories with adversaries (attack signal) injected at the primary controllers of the grid forming (GFM) inverters where RL agents (or controllers) are being trained to mitigate the injected attacks. For networked microgrids, the horizontal Fed-RL method involving distinct independent environments is not appropriate, leading us to develop vertical variant Federated Soft Actor-Critic (FedSAC) algorithm to grasp the interconnected dynamics of networked microgrid. Next, utilizing OpenAI Gym interface, we built a custom simulation set-up in GridLAB-D/HELICS co-simulation platform, named Resilient RL Co-simulation (ResRLCoSIM), to train the RL agents with IEEE 123-bus benchmark test systems comprising 3 interconnected microgrids. Finally, the learned policies in simulation world are transferred to the real-time hardware-in-the-loop test-bed set-up developed using high-fidelity Hypersim platform. Experiments show that the simulator-trained RL controllers produce convincing results with the real-time test-bed set-up, validating the minimization of sim-to-real gap.
Enhancing Cyber Resilience of Networked Microgrids using Vertical Federated Reinforcement Learning
Dec 17, 2022



This paper presents a novel federated reinforcement learning (Fed-RL) methodology to enhance the cyber resiliency of networked microgrids. We formulate a resilient reinforcement learning (RL) training setup which (a) generates episodic trajectories injecting adversarial actions at primary control reference signals of the grid forming (GFM) inverters and (b) trains the RL agents (or controllers) to alleviate the impact of the injected adversaries. To circumvent data-sharing issues and concerns for proprietary privacy in multi-party-owned networked grids, we bring in the aspects of federated machine learning and propose a novel Fed-RL algorithm to train the RL agents. To this end, the conventional horizontal Fed-RL approaches using decoupled independent environments fail to capture the coupled dynamics in a networked microgrid, which leads us to propose a multi-agent vertically federated variation of actor-critic algorithms, namely federated soft actor-critic (FedSAC) algorithm. We created a customized simulation setup encapsulating microgrid dynamics in the GridLAB-D/HELICS co-simulation platform compatible with the OpenAI Gym interface for training RL agents. Finally, the proposed methodology is validated with numerical examples of modified IEEE 123-bus benchmark test systems consisting of three coupled microgrids.
Efficient Learning of Voltage Control Strategies via Model-based Deep Reinforcement Learning
Dec 06, 2022This article proposes a model-based deep reinforcement learning (DRL) method to design emergency control strategies for short-term voltage stability problems in power systems. Recent advances show promising results in model-free DRL-based methods for power systems, but model-free methods suffer from poor sample efficiency and training time, both critical for making state-of-the-art DRL algorithms practically applicable. DRL-agent learns an optimal policy via a trial-and-error method while interacting with the real-world environment. And it is desirable to minimize the direct interaction of the DRL agent with the real-world power grid due to its safety-critical nature. Additionally, state-of-the-art DRL-based policies are mostly trained using a physics-based grid simulator where dynamic simulation is computationally intensive, lowering the training efficiency. We propose a novel model-based-DRL framework where a deep neural network (DNN)-based dynamic surrogate model, instead of a real-world power-grid or physics-based simulation, is utilized with the policy learning framework, making the process faster and sample efficient. However, stabilizing model-based DRL is challenging because of the complex system dynamics of large-scale power systems. We solved these issues by incorporating imitation learning to have a warm start in policy learning, reward-shaping, and multi-step surrogate loss. Finally, we achieved 97.5% sample efficiency and 87.7% training efficiency for an application to the IEEE 300-bus test system.
Physics-informed Evolutionary Strategy based Control for Mitigating Delayed Voltage Recovery
Nov 29, 2021



In this work we propose a novel data-driven, real-time power system voltage control method based on the physics-informed guided meta evolutionary strategy (ES). The main objective is to quickly provide an adaptive control strategy to mitigate the fault-induced delayed voltage recovery (FIDVR) problem. Reinforcement learning methods have been developed for the same or similar challenging control problems, but they suffer from training inefficiency and lack of robustness for "corner or unseen" scenarios. On the other hand, extensive physical knowledge has been developed in power systems but little has been leveraged in learning-based approaches. To address these challenges, we introduce the trainable action mask technique for flexibly embedding physical knowledge into RL models to rule out unnecessary or unfavorable actions, and achieve notable improvements in sample efficiency, control performance and robustness. Furthermore, our method leverages past learning experience to derive surrogate gradient to guide and accelerate the exploration process in training. Case studies on the IEEE 300-bus system and comparisons with other state-of-the-art benchmark methods demonstrate effectiveness and advantages of our method.
Scalable Voltage Control using Structure-Driven Hierarchical Deep Reinforcement Learning
Jan 29, 2021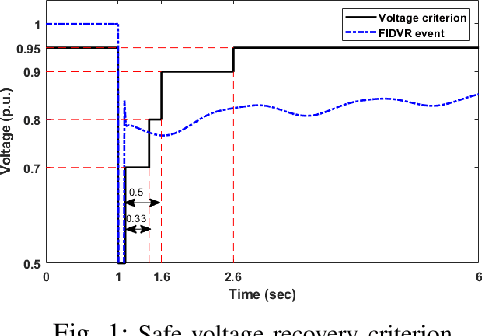
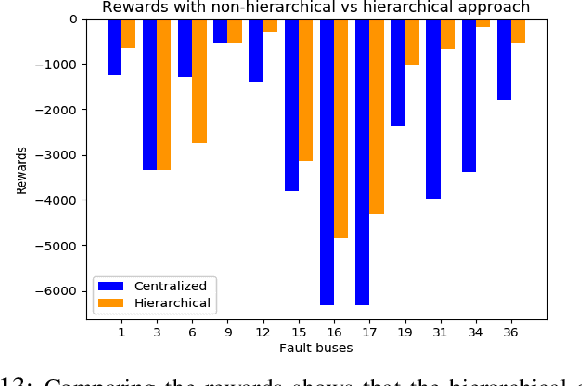
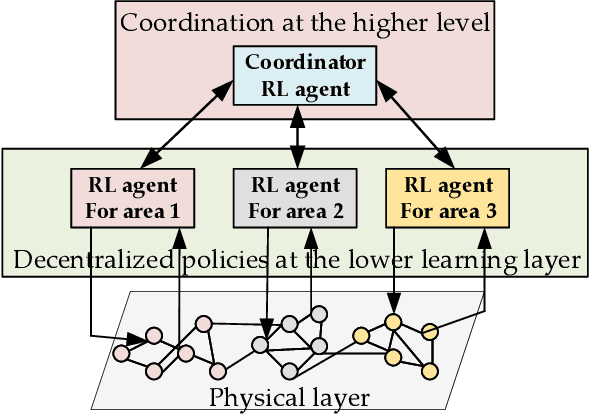
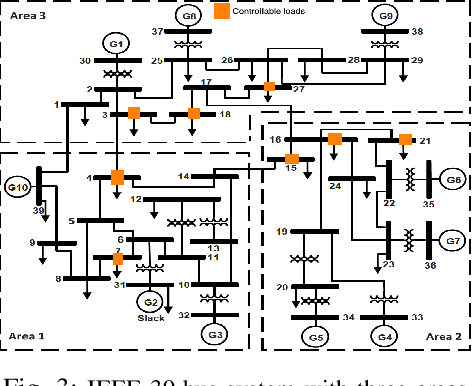
This paper presents a novel hierarchical deep reinforcement learning (DRL) based design for the voltage control of power grids. DRL agents are trained for fast, and adaptive selection of control actions such that the voltage recovery criterion can be met following disturbances. Existing voltage control techniques suffer from the issues of speed of operation, optimal coordination between different locations, and scalability. We exploit the area-wise division structure of the power system to propose a hierarchical DRL design that can be scaled to the larger grid models. We employ an enhanced augmented random search algorithm that is tailored for the voltage control problem in a two-level architecture. We train area-wise decentralized RL agents to compute lower-level policies for the individual areas, and concurrently train a higher-level DRL agent that uses the updates of the lower-level policies to efficiently coordinate the control actions taken by the lower-level agents. Numerical experiments on the IEEE benchmark 39-bus model with 3 areas demonstrate the advantages and various intricacies of the proposed hierarchical approach.
Learning and Fast Adaptation for Grid Emergency Control via Deep Meta Reinforcement Learning
Jan 13, 2021
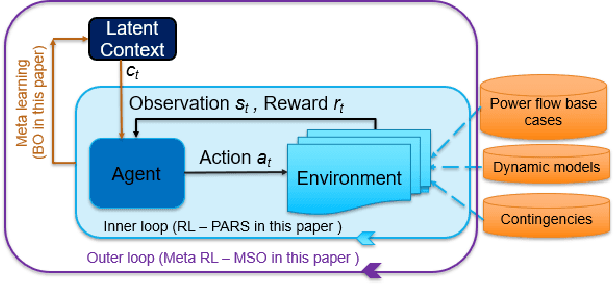
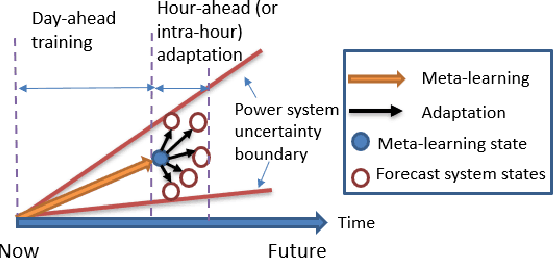
As power systems are undergoing a significant transformation with more uncertainties, less inertia and closer to operation limits, there is increasing risk of large outages. Thus, there is an imperative need to enhance grid emergency control to maintain system reliability and security. Towards this end, great progress has been made in developing deep reinforcement learning (DRL) based grid control solutions in recent years. However, existing DRL-based solutions have two main limitations: 1) they cannot handle well with a wide range of grid operation conditions, system parameters, and contingencies; 2) they generally lack the ability to fast adapt to new grid operation conditions, system parameters, and contingencies, limiting their applicability for real-world applications. In this paper, we mitigate these limitations by developing a novel deep meta reinforcement learning (DMRL) algorithm. The DMRL combines the meta strategy optimization together with DRL, and trains policies modulated by a latent space that can quickly adapt to new scenarios. We test the developed DMRL algorithm on the IEEE 300-bus system. We demonstrate fast adaptation of the meta-trained DRL polices with latent variables to new operating conditions and scenarios using the proposed method and achieve superior performance compared to the state-of-the-art DRL and model predictive control (MPC) methods.