 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePolicy Gradient-Based EMT-in-the-Loop Learning to Mitigate Sub-Synchronous Control Interactions
Nov 08, 2025


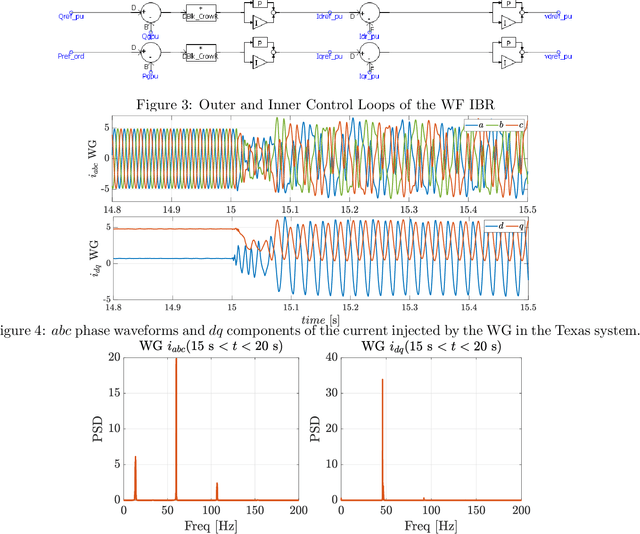
This paper explores the development of learning-based tunable control gains using EMT-in-the-loop simulation framework (e.g., PSCAD interfaced with Python-based learning modules) to address critical sub-synchronous oscillations. Since sub-synchronous control interactions (SSCI) arise from the mis-tuning of control gains under specific grid configurations, effective mitigation strategies require adaptive re-tuning of these gains. Such adaptiveness can be achieved by employing a closed-loop, learning-based framework that considers the grid conditions responsible for such sub-synchronous oscillations. This paper addresses this need by adopting methodologies inspired by Markov decision process (MDP) based reinforcement learning (RL), with a particular emphasis on simpler deep policy gradient methods with additional SSCI-specific signal processing modules such as down-sampling, bandpass filtering, and oscillation energy dependent reward computations. Our experimentation in a real-world event setting demonstrates that the deep policy gradient based trained policy can adaptively compute gain settings in response to varying grid conditions and optimally suppress control interaction-induced oscillations.
Resilient Control of Networked Microgrids using Vertical Federated Reinforcement Learning: Designs and Real-Time Test-Bed Validations
Nov 21, 2023



Improving system-level resiliency of networked microgrids is an important aspect with increased population of inverter-based resources (IBRs). This paper (1) presents resilient control design in presence of adversarial cyber-events, and proposes a novel federated reinforcement learning (Fed-RL) approach to tackle (a) model complexities, unknown dynamical behaviors of IBR devices, (b) privacy issues regarding data sharing in multi-party-owned networked grids, and (2) transfers learned controls from simulation to hardware-in-the-loop test-bed, thereby bridging the gap between simulation and real world. With these multi-prong objectives, first, we formulate a reinforcement learning (RL) training setup generating episodic trajectories with adversaries (attack signal) injected at the primary controllers of the grid forming (GFM) inverters where RL agents (or controllers) are being trained to mitigate the injected attacks. For networked microgrids, the horizontal Fed-RL method involving distinct independent environments is not appropriate, leading us to develop vertical variant Federated Soft Actor-Critic (FedSAC) algorithm to grasp the interconnected dynamics of networked microgrid. Next, utilizing OpenAI Gym interface, we built a custom simulation set-up in GridLAB-D/HELICS co-simulation platform, named Resilient RL Co-simulation (ResRLCoSIM), to train the RL agents with IEEE 123-bus benchmark test systems comprising 3 interconnected microgrids. Finally, the learned policies in simulation world are transferred to the real-time hardware-in-the-loop test-bed set-up developed using high-fidelity Hypersim platform. Experiments show that the simulator-trained RL controllers produce convincing results with the real-time test-bed set-up, validating the minimization of sim-to-real gap.
Enhancing Cyber Resilience of Networked Microgrids using Vertical Federated Reinforcement Learning
Dec 17, 2022This paper presents a novel federated reinforcement learning (Fed-RL) methodology to enhance the cyber resiliency of networked microgrids. We formulate a resilient reinforcement learning (RL) training setup which (a) generates episodic trajectories injecting adversarial actions at primary control reference signals of the grid forming (GFM) inverters and (b) trains the RL agents (or controllers) to alleviate the impact of the injected adversaries. To circumvent data-sharing issues and concerns for proprietary privacy in multi-party-owned networked grids, we bring in the aspects of federated machine learning and propose a novel Fed-RL algorithm to train the RL agents. To this end, the conventional horizontal Fed-RL approaches using decoupled independent environments fail to capture the coupled dynamics in a networked microgrid, which leads us to propose a multi-agent vertically federated variation of actor-critic algorithms, namely federated soft actor-critic (FedSAC) algorithm. We created a customized simulation setup encapsulating microgrid dynamics in the GridLAB-D/HELICS co-simulation platform compatible with the OpenAI Gym interface for training RL agents. Finally, the proposed methodology is validated with numerical examples of modified IEEE 123-bus benchmark test systems consisting of three coupled microgrids.
Efficient Learning of Voltage Control Strategies via Model-based Deep Reinforcement Learning
Dec 06, 2022This article proposes a model-based deep reinforcement learning (DRL) method to design emergency control strategies for short-term voltage stability problems in power systems. Recent advances show promising results in model-free DRL-based methods for power systems, but model-free methods suffer from poor sample efficiency and training time, both critical for making state-of-the-art DRL algorithms practically applicable. DRL-agent learns an optimal policy via a trial-and-error method while interacting with the real-world environment. And it is desirable to minimize the direct interaction of the DRL agent with the real-world power grid due to its safety-critical nature. Additionally, state-of-the-art DRL-based policies are mostly trained using a physics-based grid simulator where dynamic simulation is computationally intensive, lowering the training efficiency. We propose a novel model-based-DRL framework where a deep neural network (DNN)-based dynamic surrogate model, instead of a real-world power-grid or physics-based simulation, is utilized with the policy learning framework, making the process faster and sample efficient. However, stabilizing model-based DRL is challenging because of the complex system dynamics of large-scale power systems. We solved these issues by incorporating imitation learning to have a warm start in policy learning, reward-shaping, and multi-step surrogate loss. Finally, we achieved 97.5% sample efficiency and 87.7% training efficiency for an application to the IEEE 300-bus test system.
Data-Driven Linear Koopman Embedding for Model-Predictive Power System Control
Jun 02, 2022



This paper presents a linear Koopman embedding for model predictive emergency voltage regulation in power systems, by way of a data-driven lifting of the system dynamics into a higher dimensional linear space over which the MPC (model predictive control) is exercised, thereby scaling as well as expediting the MPC computation for its real-time implementation for practical systems. We develop a {\em Koopman-inspired deep neural network} (KDNN) architecture for the linear embedding of the voltage dynamics subjected to reactive controls. The training of the KDNN for the purposes of linear embedding is done using the simulated voltage trajectories under a variety of applied control inputs and load conditions. The proposed framework learns the underlying system dynamics from the input/output data in the form of a triple of transforms: A Neural Network (NN)-based lifting to a higher dimension, a linear dynamics within that higher dynamics, and an NN-based projection to original space. This approach alleviates the burden of an ad-hoc selection of the basis functions for the purposes of lifting to higher dimensional linear space. The MPC is computed over the linear dynamics, making the control computation scalable and also real-time.