 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge$\partial$CBDs: Differentiable Causal Block Diagrams
Feb 07, 2026Modern cyber-physical systems (CPS) integrate physics, computation, and learning, demanding modeling frameworks that are simultaneously composable, learnable, and verifiable. Yet existing approaches treat these goals in isolation: causal block diagrams (CBDs) support modular system interconnections but lack differentiability for learning; differentiable programming (DP) enables end-to-end gradient-based optimization but provides limited correctness guarantees; while contract-based verification frameworks remain largely disconnected from data-driven model refinement. To address these limitations, we introduce differentiable causal block diagrams ($\partial$CBDs), a unifying formalism that integrates these three perspectives. Our approach (i) retains the compositional structure and execution semantics of CBDs, (ii) incorporates assume--guarantee (A--G) contracts for modular correctness reasoning, and (iii) introduces residual-based contracts as differentiable, trajectory-level certificates compatible with automatic differentiation (AD), enabling gradient-based optimization and learning. Together, these elements enable a scalable, verifiable, and trainable modeling pipeline that preserves causality and modularity while supporting data-, physics-, and constraint-informed optimization for CPS.
PHDME: Physics-Informed Diffusion Models without Explicit Governing Equations
Jan 29, 2026Diffusion models provide expressive priors for forecasting trajectories of dynamical systems, but are typically unreliable in the sparse data regime. Physics-informed machine learning (PIML) improves reliability in such settings; however, most methods require \emph{explicit governing equations} during training, which are often only partially known due to complex and nonlinear dynamics. We introduce \textbf{PHDME}, a port-Hamiltonian diffusion framework designed for \emph{sparse observations} and \emph{incomplete physics}. PHDME leverages port-Hamiltonian structural prior but does not require full knowledge of the closed-form governing equations. Our approach first trains a Gaussian process distributed Port-Hamiltonian system (GP-dPHS) on limited observations to capture an energy-based representation of the dynamics. The GP-dPHS is then used to generate a physically consistent artificial dataset for diffusion training, and to inform the diffusion model with a structured physics residual loss. After training, the diffusion model acts as an amortized sampler and forecaster for fast trajectory generation. Finally, we apply split conformal calibration to provide uncertainty statements for the generated predictions. Experiments on PDE benchmarks and a real-world spring system show improved accuracy and physical consistency under data scarcity.
Plug-and-Play Physics-informed Learning using Uncertainty Quantified Port-Hamiltonian Models
Apr 24, 2025



The ability to predict trajectories of surrounding agents and obstacles is a crucial component in many robotic applications. Data-driven approaches are commonly adopted for state prediction in scenarios where the underlying dynamics are unknown. However, the performance, reliability, and uncertainty of data-driven predictors become compromised when encountering out-of-distribution observations relative to the training data. In this paper, we introduce a Plug-and-Play Physics-Informed Machine Learning (PnP-PIML) framework to address this challenge. Our method employs conformal prediction to identify outlier dynamics and, in that case, switches from a nominal predictor to a physics-consistent model, namely distributed Port-Hamiltonian systems (dPHS). We leverage Gaussian processes to model the energy function of the dPHS, enabling not only the learning of system dynamics but also the quantification of predictive uncertainty through its Bayesian nature. In this way, the proposed framework produces reliable physics-informed predictions even for the out-of-distribution scenarios.
Physics-Constrained Learning for PDE Systems with Uncertainty Quantified Port-Hamiltonian Models
Jun 17, 2024



Modeling the dynamics of flexible objects has become an emerging topic in the community as these objects become more present in many applications, e.g., soft robotics. Due to the properties of flexible materials, the movements of soft objects are often highly nonlinear and, thus, complex to predict. Data-driven approaches seem promising for modeling those complex dynamics but often neglect basic physical principles, which consequently makes them untrustworthy and limits generalization. To address this problem, we propose a physics-constrained learning method that combines powerful learning tools and reliable physical models. Our method leverages the data collected from observations by sending them into a Gaussian process that is physically constrained by a distributed Port-Hamiltonian model. Based on the Bayesian nature of the Gaussian process, we not only learn the dynamics of the system, but also enable uncertainty quantification. Furthermore, the proposed approach preserves the compositional nature of Port-Hamiltonian systems.
Physics-enhanced Gaussian Process Variational Autoencoder
May 15, 2023Variational autoencoders allow to learn a lower-dimensional latent space based on high-dimensional input/output data. Using video clips as input data, the encoder may be used to describe the movement of an object in the video without ground truth data (unsupervised learning). Even though the object's dynamics is typically based on first principles, this prior knowledge is mostly ignored in the existing literature. Thus, we propose a physics-enhanced variational autoencoder that places a physical-enhanced Gaussian process prior on the latent dynamics to improve the efficiency of the variational autoencoder and to allow physically correct predictions. The physical prior knowledge expressed as linear dynamical system is here reflected by the Green's function and included in the kernel function of the Gaussian process. The benefits of the proposed approach are highlighted in a simulation with an oscillating particle.
Gaussian Process Port-Hamiltonian Systems: Bayesian Learning with Physics Prior
May 15, 2023



Data-driven approaches achieve remarkable results for the modeling of complex dynamics based on collected data. However, these models often neglect basic physical principles which determine the behavior of any real-world system. This omission is unfavorable in two ways: The models are not as data-efficient as they could be by incorporating physical prior knowledge, and the model itself might not be physically correct. We propose Gaussian Process Port-Hamiltonian systems (GP-PHS) as a physics-informed Bayesian learning approach with uncertainty quantification. The Bayesian nature of GP-PHS uses collected data to form a distribution over all possible Hamiltonians instead of a single point estimate. Due to the underlying physics model, a GP-PHS generates passive systems with respect to designated inputs and outputs. Further, the proposed approach preserves the compositional nature of Port-Hamiltonian systems.
Learning Switching Port-Hamiltonian Systems with Uncertainty Quantification
May 15, 2023Switching physical systems are ubiquitous in modern control applications, for instance, locomotion behavior of robots and animals, power converters with switches and diodes. The dynamics and switching conditions are often hard to obtain or even inaccessible in case of a-priori unknown environments and nonlinear components. Black-box neural networks can learn to approximately represent switching dynamics, but typically require a large amount of data, neglect the underlying axioms of physics, and lack of uncertainty quantification. We propose a Gaussian process based learning approach enhanced by switching Port-Hamiltonian systems (GP-SPHS) to learn physical plausible system dynamics and identify the switching condition. The Bayesian nature of Gaussian processes uses collected data to form a distribution over all possible switching policies and dynamics that allows for uncertainty quantification. Furthermore, the proposed approach preserves the compositional nature of Port-Hamiltonian systems. A simulation with a hopping robot validates the effectiveness of the proposed approach.
The Value of Data in Learning-Based Control for Training Subset Selection
Nov 20, 2020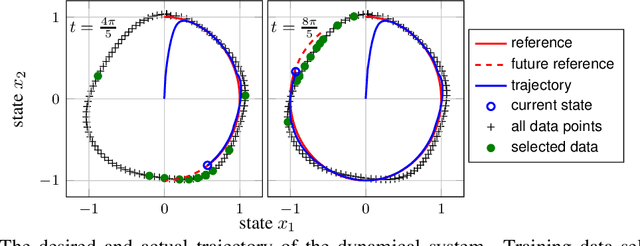

Despite the existence of formal guarantees for learning-based control approaches, the relationship between data and control performance is still poorly understood. In this paper, we present a measure to quantify the value of data within the context of a predefined control task. Our approach is applicable to a wide variety of unknown nonlinear systems that are to be controlled by a generic learning-based control law. We model the unknown component of the system using Gaussian processes, which in turn allows us to directly assess the impact of model uncertainty on control. Results obtained in numerical simulations indicate the efficacy of the proposed measure.
Real-time Uncertainty Decomposition for Online Learning Control
Oct 06, 2020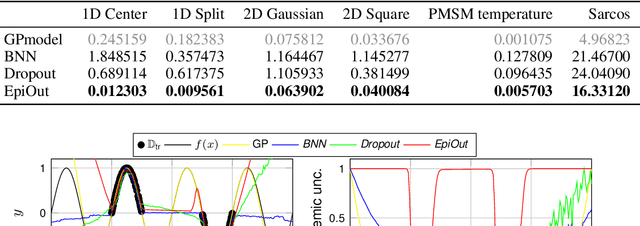
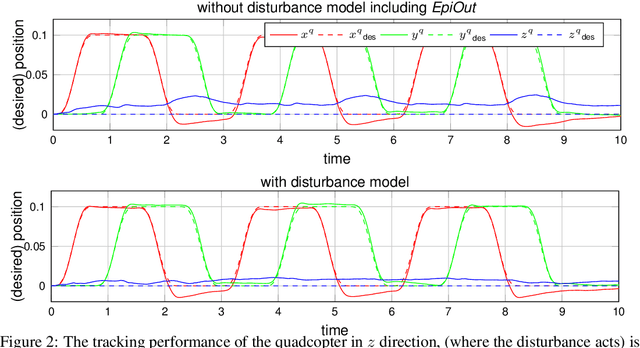


Safety-critical decisions based on machine learning models require a clear understanding of the involved uncertainties to avoid hazardous or risky situations. While aleatoric uncertainty can be explicitly modeled given a parametric description, epistemic uncertainty rather describes the presence or absence of training data. This paper proposes a novel generic method for modeling epistemic uncertainty and shows its advantages over existing approaches for neural networks on various data sets. It can be directly combined with aleatoric uncertainty estimates and allows for prediction in real-time as the inference is sample-free. We exploit this property in a model-based quadcopter control setting and demonstrate how the controller benefits from a differentiation between aleatoric and epistemic uncertainty in online learning of thermal disturbances.
Safe learning-based trajectory tracking for underactuated vehicles with partially unknown dynamics
Sep 14, 2020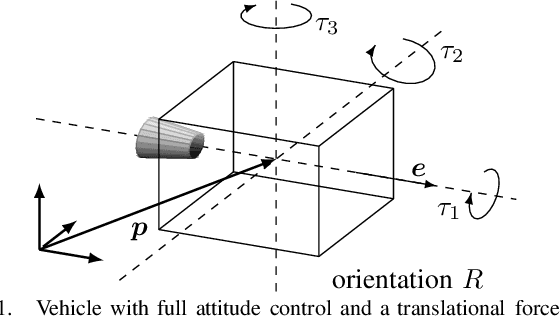
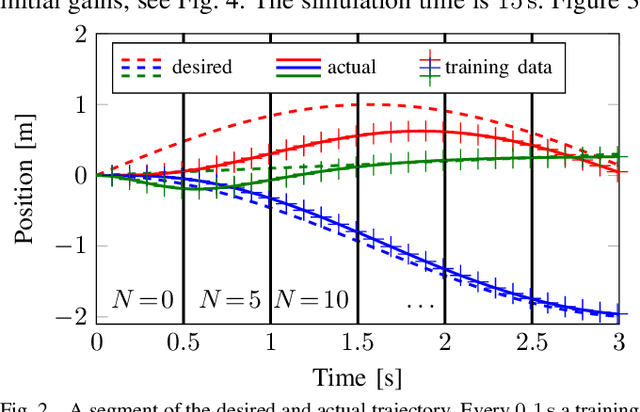
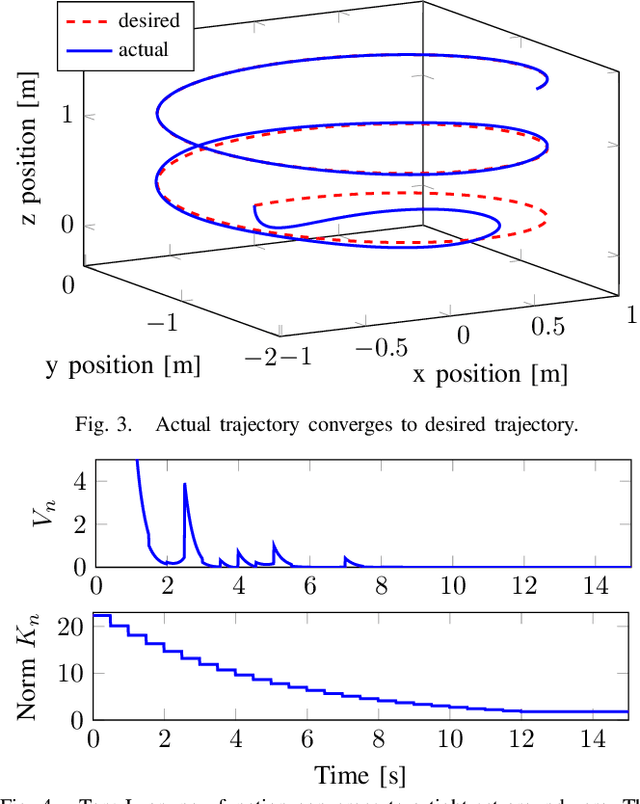
Underactuated vehicles have gained much attention in the recent years due to the increasing amount of aerial and underwater vehicles as well as nanosatellites. The safe tracking control of these vehicles is a substantial aspect for an increasing range of application domains. However, external disturbances and parts of the internal dynamics are often unknown or very time-consuming to model. To overcome this issue, we present a safe tracking control law for underactuated vehicles using a learning-based oracle for the prediction of the unknown dynamics. The presented approach guarantees the boundedness of the tracking error with high probability where the bound is explicitly given. With additional assumptions, asymptotic stability is achieved. A simulation with a quadrocopter visualizes the effectiveness of the proposed control law.