 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStable Walking for Bipedal Locomotion under Foot-Slip via Virtual Nonholonomic Constraints
Mar 30, 2026Foot slip is a major source of instability in bipedal locomotion on low-friction or uncertain terrain. Standard control approaches typically assume no-slip contact and therefore degrade when slip occurs. We propose a control framework that explicitly incorporates slip into the locomotion model through virtual nonholonomic constraints, which regulate the tangential stance-foot velocity while remaining compatible with the virtual holonomic constraints used to generate the walking gait. The resulting closed-loop system is formulated as a hybrid dynamical system with continuous swing dynamics and discrete impact events. A nonlinear feedback law enforces both classes of constraints and yields a slip-compatible hybrid zero dynamics manifold for the reduced-order locomotion dynamics. Stability of periodic walking gaits is characterized through the associated Poincaré map, and numerical results illustrate stabilization under slip conditions.
Dual-quaternion learning control for autonomous vehicle trajectory tracking with safety guarantees
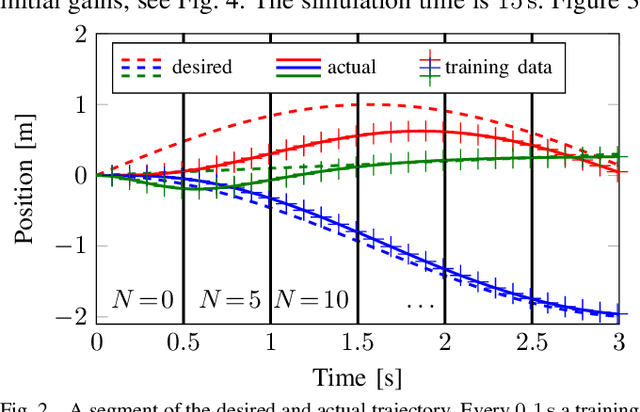
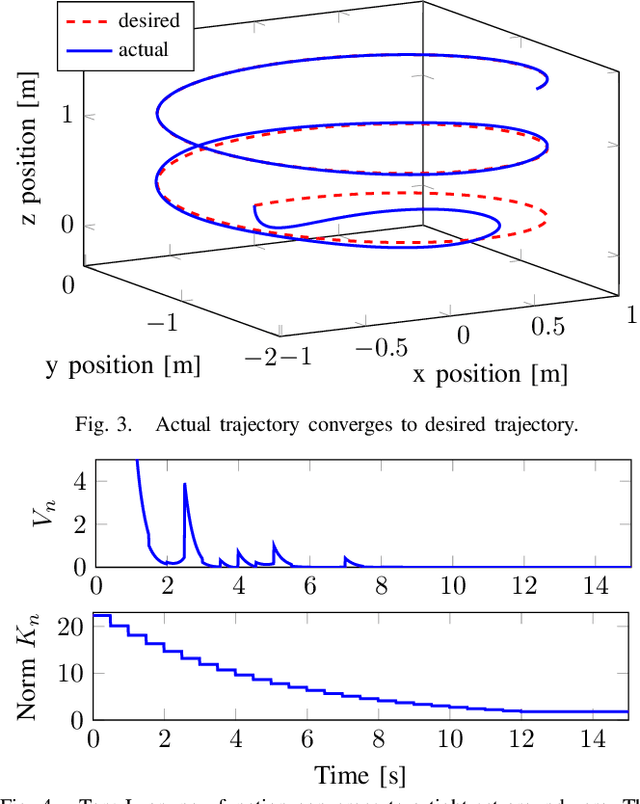
Jan 06, 2026We propose a learning-based trajectory tracking controller for autonomous robotic platforms whose motion can be described kinematically on $\mathrm{SE}(3)$. The controller is formulated in the dual quaternion framework and operates at the velocity level, assuming direct command of angular and linear velocities, as is standard in many aerial vehicles and omnidirectional mobile robots. Gaussian Process (GP) regression is integrated into a geometric feedback law to learn and compensate online for unknown, state-dependent disturbances and modeling imperfections affecting both attitude and position, while preserving the algebraic structure and coupling properties inherent to rigid-body motion. The proposed approach does not rely on explicit parametric models of the unknown effects, making it well-suited for robotic systems subject to sensor-induced disturbances, unmodeled actuation couplings, and environmental uncertainties. A Lyapunov-based analysis establishes probabilistic ultimate boundedness of the pose tracking error under bounded GP uncertainty, providing formal stability guarantees for the learning-based controller. Simulation results demonstrate accurate and smooth trajectory tracking in the presence of realistic, localized disturbances, including correlated rotational and translational effects arising from magnetometer perturbations. These results illustrate the potential of combining geometric modeling and probabilistic learning to achieve robust, data-efficient pose control for autonomous robotic systems.
Enhanced UAV Navigation Systems through Sensor Fusion with Trident Quaternions
Apr 19, 2025This paper presents an integrated navigation algorithm based on trident quaternions, an extension of dual quaternions. The proposed methodology provides an efficient approach for achieving precise and robust navigation by leveraging the advantages of trident quaternions. The performance of the navigation system was validated through experimental tests using a multi-rotor UAV equipped with two navigation computers: one executing the proposed algorithm and the other running a commercial autopilot, which was used as a reference.
The Interplay Between Symmetries and Impact Effects on Hybrid Mechanical Systems
Mar 19, 2024
Hybrid systems are dynamical systems with continuous-time and discrete-time components in their dynamics. When hybrid systems are defined on a principal bundle we are able to define two classes of impacts for the discrete-time transition of the dynamics: interior impacts and exterior impacts. In this paper we define hybrid systems on principal bundles, study the underlying geometry on the switching surface where impacts occur and we find conditions for which both exterior and interior impacts are preserved by the mechanical connection induced in the principal bundle.
Safe learning-based trajectory tracking for underactuated vehicles with partially unknown dynamics
Sep 14, 2020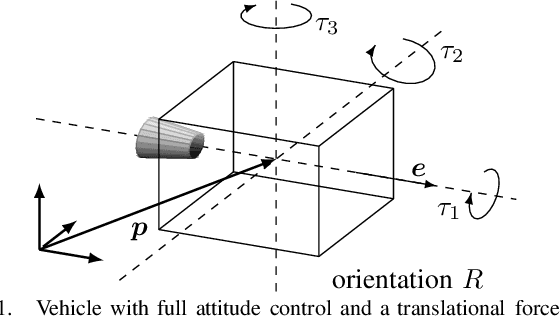
Underactuated vehicles have gained much attention in the recent years due to the increasing amount of aerial and underwater vehicles as well as nanosatellites. The safe tracking control of these vehicles is a substantial aspect for an increasing range of application domains. However, external disturbances and parts of the internal dynamics are often unknown or very time-consuming to model. To overcome this issue, we present a safe tracking control law for underactuated vehicles using a learning-based oracle for the prediction of the unknown dynamics. The presented approach guarantees the boundedness of the tracking error with high probability where the bound is explicitly given. With additional assumptions, asymptotic stability is achieved. A simulation with a quadrocopter visualizes the effectiveness of the proposed control law.
On the observability of relative positions in left-invariant multi-agent control systems and its application to formation control
Sep 19, 2019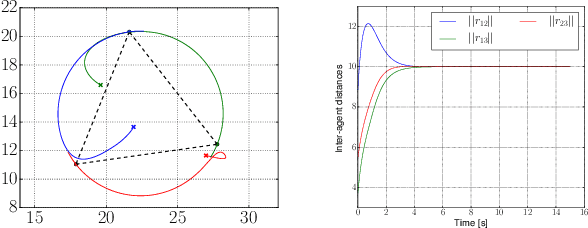
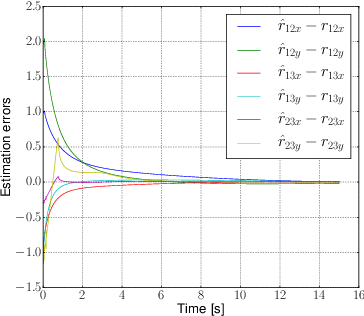
We consider the localization problem between agents while they run a formation control algorithm. These algorithms typically demand from the agents the information about their relative positions with respect to their neighbors. We assume that this information is not available. Therefore, the agents need to solve the observability problem of reconstructing their relative positions based on other measurements between them. We first model the relative kinematics between the agents as a left-invariant control system so that we can exploit its appealing properties to solve the observability problem. Then, as a particular application, we will focus on agents running a distance-based control algorithm where their relative positions are not accessible but the distances between them are.