 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn the observability of relative positions in left-invariant multi-agent control systems and its application to formation control
Sep 19, 2019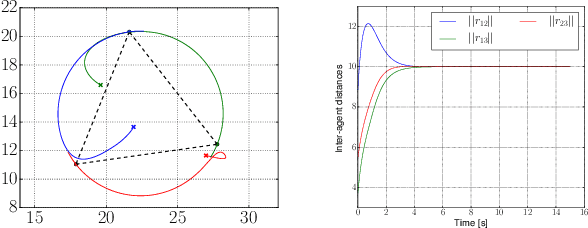
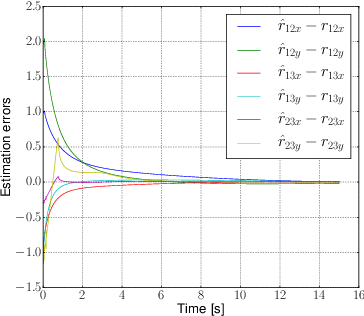
We consider the localization problem between agents while they run a formation control algorithm. These algorithms typically demand from the agents the information about their relative positions with respect to their neighbors. We assume that this information is not available. Therefore, the agents need to solve the observability problem of reconstructing their relative positions based on other measurements between them. We first model the relative kinematics between the agents as a left-invariant control system so that we can exploit its appealing properties to solve the observability problem. Then, as a particular application, we will focus on agents running a distance-based control algorithm where their relative positions are not accessible but the distances between them are.