 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePHDME: Physics-Informed Diffusion Models without Explicit Governing Equations
Jan 29, 2026Diffusion models provide expressive priors for forecasting trajectories of dynamical systems, but are typically unreliable in the sparse data regime. Physics-informed machine learning (PIML) improves reliability in such settings; however, most methods require \emph{explicit governing equations} during training, which are often only partially known due to complex and nonlinear dynamics. We introduce \textbf{PHDME}, a port-Hamiltonian diffusion framework designed for \emph{sparse observations} and \emph{incomplete physics}. PHDME leverages port-Hamiltonian structural prior but does not require full knowledge of the closed-form governing equations. Our approach first trains a Gaussian process distributed Port-Hamiltonian system (GP-dPHS) on limited observations to capture an energy-based representation of the dynamics. The GP-dPHS is then used to generate a physically consistent artificial dataset for diffusion training, and to inform the diffusion model with a structured physics residual loss. After training, the diffusion model acts as an amortized sampler and forecaster for fast trajectory generation. Finally, we apply split conformal calibration to provide uncertainty statements for the generated predictions. Experiments on PDE benchmarks and a real-world spring system show improved accuracy and physical consistency under data scarcity.
How Real is CARLAs Dynamic Vision Sensor? A Study on the Sim-to-Real Gap in Traffic Object Detection
Jun 16, 2025Event cameras are gaining traction in traffic monitoring applications due to their low latency, high temporal resolution, and energy efficiency, which makes them well-suited for real-time object detection at traffic intersections. However, the development of robust event-based detection models is hindered by the limited availability of annotated real-world datasets. To address this, several simulation tools have been developed to generate synthetic event data. Among these, the CARLA driving simulator includes a built-in dynamic vision sensor (DVS) module that emulates event camera output. Despite its potential, the sim-to-real gap for event-based object detection remains insufficiently studied. In this work, we present a systematic evaluation of this gap by training a recurrent vision transformer model exclusively on synthetic data generated using CARLAs DVS and testing it on varying combinations of synthetic and real-world event streams. Our experiments show that models trained solely on synthetic data perform well on synthetic-heavy test sets but suffer significant performance degradation as the proportion of real-world data increases. In contrast, models trained on real-world data demonstrate stronger generalization across domains. This study offers the first quantifiable analysis of the sim-to-real gap in event-based object detection using CARLAs DVS. Our findings highlight limitations in current DVS simulation fidelity and underscore the need for improved domain adaptation techniques in neuromorphic vision for traffic monitoring.
Plug-and-Play Physics-informed Learning using Uncertainty Quantified Port-Hamiltonian Models
Apr 24, 2025The ability to predict trajectories of surrounding agents and obstacles is a crucial component in many robotic applications. Data-driven approaches are commonly adopted for state prediction in scenarios where the underlying dynamics are unknown. However, the performance, reliability, and uncertainty of data-driven predictors become compromised when encountering out-of-distribution observations relative to the training data. In this paper, we introduce a Plug-and-Play Physics-Informed Machine Learning (PnP-PIML) framework to address this challenge. Our method employs conformal prediction to identify outlier dynamics and, in that case, switches from a nominal predictor to a physics-consistent model, namely distributed Port-Hamiltonian systems (dPHS). We leverage Gaussian processes to model the energy function of the dPHS, enabling not only the learning of system dynamics but also the quantification of predictive uncertainty through its Bayesian nature. In this way, the proposed framework produces reliable physics-informed predictions even for the out-of-distribution scenarios.
Physics-Constrained Learning for PDE Systems with Uncertainty Quantified Port-Hamiltonian Models
Jun 17, 2024Modeling the dynamics of flexible objects has become an emerging topic in the community as these objects become more present in many applications, e.g., soft robotics. Due to the properties of flexible materials, the movements of soft objects are often highly nonlinear and, thus, complex to predict. Data-driven approaches seem promising for modeling those complex dynamics but often neglect basic physical principles, which consequently makes them untrustworthy and limits generalization. To address this problem, we propose a physics-constrained learning method that combines powerful learning tools and reliable physical models. Our method leverages the data collected from observations by sending them into a Gaussian process that is physically constrained by a distributed Port-Hamiltonian model. Based on the Bayesian nature of the Gaussian process, we not only learn the dynamics of the system, but also enable uncertainty quantification. Furthermore, the proposed approach preserves the compositional nature of Port-Hamiltonian systems.
Mission-driven Exploration for Accelerated Deep Reinforcement Learning with Temporal Logic Task Specifications
Nov 28, 2023


This paper addresses the problem of designing optimal control policies for mobile robots with mission and safety requirements specified using Linear Temporal Logic (LTL). We consider robots with unknown stochastic dynamics operating in environments with unknown geometric structure. The robots are equipped with sensors allowing them to detect obstacles. Our goal is to synthesize a control policy that maximizes the probability of satisfying an LTL-encoded task in the presence of motion and environmental uncertainty. Several deep reinforcement learning (DRL) algorithms have been proposed recently to address similar problems. A common limitation in related works is that of slow learning performance. In order to address this issue, we propose a novel DRL algorithm, which has the capability to learn control policies at a notably faster rate compared to similar methods. Its sample efficiency is due to a mission-driven exploration strategy that prioritizes exploration towards directions that may contribute to mission accomplishment. Identifying these directions relies on an automaton representation of the LTL task as well as a learned neural network that (partially) models the unknown system dynamics. We provide comparative experiments demonstrating the efficiency of our algorithm on robot navigation tasks in unknown environments.
TSegFormer: 3D Tooth Segmentation in Intraoral Scans with Geometry Guided Transformer
Nov 22, 2023Optical Intraoral Scanners (IOS) are widely used in digital dentistry to provide detailed 3D information of dental crowns and the gingiva. Accurate 3D tooth segmentation in IOSs is critical for various dental applications, while previous methods are error-prone at complicated boundaries and exhibit unsatisfactory results across patients. In this paper, we propose TSegFormer which captures both local and global dependencies among different teeth and the gingiva in the IOS point clouds with a multi-task 3D transformer architecture. Moreover, we design a geometry-guided loss based on a novel point curvature to refine boundaries in an end-to-end manner, avoiding time-consuming post-processing to reach clinically applicable segmentation. In addition, we create a dataset with 16,000 IOSs, the largest ever IOS dataset to the best of our knowledge. The experimental results demonstrate that our TSegFormer consistently surpasses existing state-of-the-art baselines. The superiority of TSegFormer is corroborated by extensive analysis, visualizations and real-world clinical applicability tests. Our code is available at https://github.com/huiminxiong/TSegFormer.
Conformal Temporal Logic Planning using Large Language Models: Knowing When to Do What and When to Ask for Help
Sep 18, 2023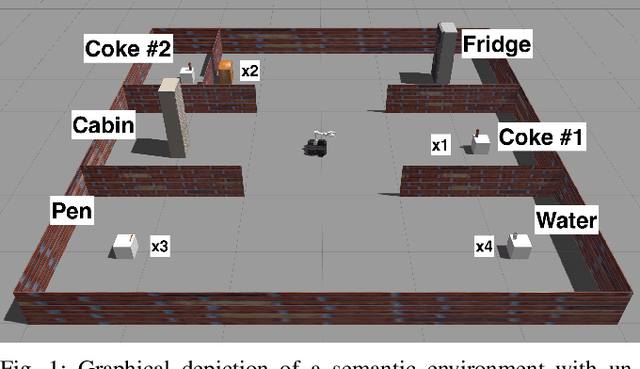
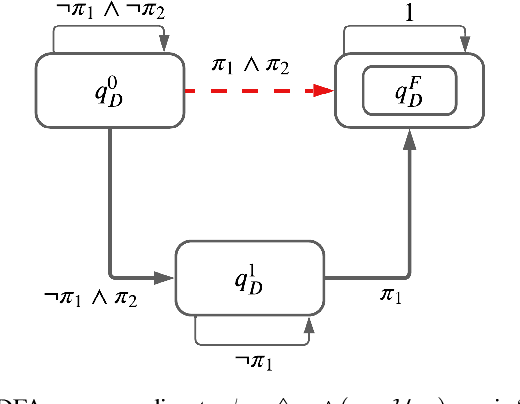

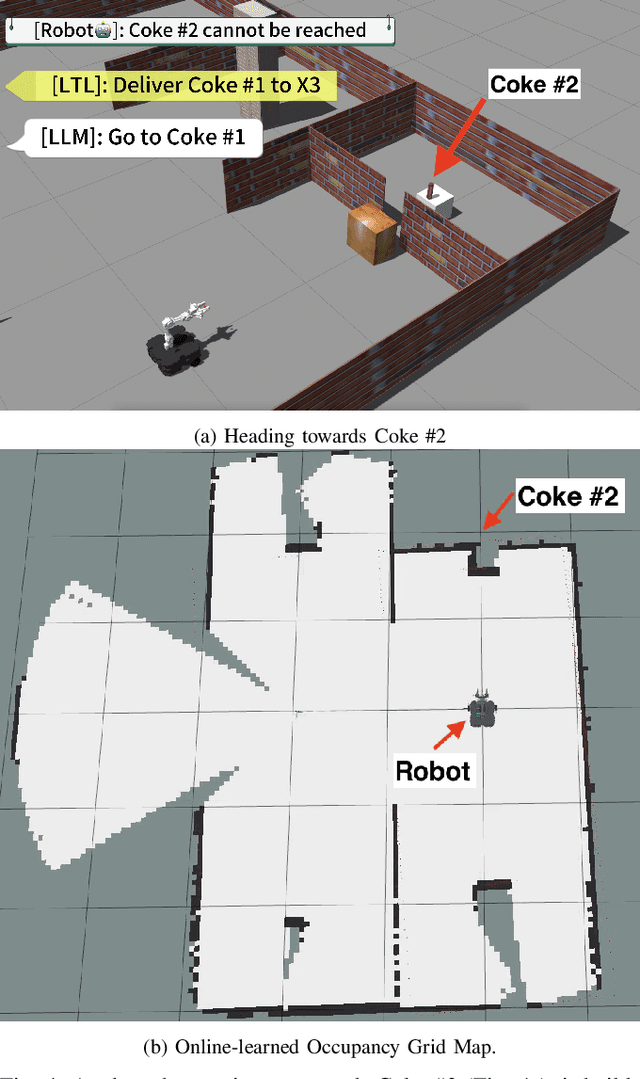
This paper addresses a new motion planning problem for mobile robots tasked with accomplishing multiple high-level sub-tasks, expressed using natural language (NL), in a temporal and logical order. To formally define such missions, we leverage LTL defined over NL-based atomic predicates modeling the considered NL-based sub-tasks. This is contrast to related planning approaches that define LTL tasks over atomic predicates capturing desired low-level system configurations. Our goal is to design robot plans that satisfy LTL tasks defined over NL-based atomic propositions. A novel technical challenge arising in this setup lies in reasoning about correctness of a robot plan with respect to such LTL-encoded tasks. To address this problem, we propose HERACLEs, a hierarchical conformal natural language planner, that relies on a novel integration of existing tools that include (i) automata theory to determine the NL-specified sub-task the robot should accomplish next to make mission progress; (ii) Large Language Models to design robot plans satisfying these sub-tasks; and (iii) conformal prediction to reason probabilistically about correctness of the designed plans and mission satisfaction and to determine if external assistance is required. We provide extensive comparative experiments on mobile manipulation tasks. The project website is ltl-llm.github.io.
Targeted Adversarial Attacks against Neural Network Trajectory Predictors
Dec 08, 2022



Trajectory prediction is an integral component of modern autonomous systems as it allows for envisioning future intentions of nearby moving agents. Due to the lack of other agents' dynamics and control policies, deep neural network (DNN) models are often employed for trajectory forecasting tasks. Although there exists an extensive literature on improving the accuracy of these models, there is a very limited number of works studying their robustness against adversarially crafted input trajectories. To bridge this gap, in this paper, we propose a targeted adversarial attack against DNN models for trajectory forecasting tasks. We call the proposed attack TA4TP for Targeted adversarial Attack for Trajectory Prediction. Our approach generates adversarial input trajectories that are capable of fooling DNN models into predicting user-specified target/desired trajectories. Our attack relies on solving a nonlinear constrained optimization problem where the objective function captures the deviation of the predicted trajectory from a target one while the constraints model physical requirements that the adversarial input should satisfy. The latter ensures that the inputs look natural and they are safe to execute (e.g., they are close to nominal inputs and away from obstacles). We demonstrate the effectiveness of TA4TP on two state-of-the-art DNN models and two datasets. To the best of our knowledge, we propose the first targeted adversarial attack against DNN models used for trajectory forecasting.
TFormer: 3D Tooth Segmentation in Mesh Scans with Geometry Guided Transformer
Oct 29, 2022Optical Intra-oral Scanners (IOS) are widely used in digital dentistry, providing 3-Dimensional (3D) and high-resolution geometrical information of dental crowns and the gingiva. Accurate 3D tooth segmentation, which aims to precisely delineate the tooth and gingiva instances in IOS, plays a critical role in a variety of dental applications. However, segmentation performance of previous methods are error-prone in complicated tooth-tooth or tooth-gingiva boundaries, and usually exhibit unsatisfactory results across various patients, yet the clinically applicability is not verified with large-scale dataset. In this paper, we propose a novel method based on 3D transformer architectures that is evaluated with large-scale and high-resolution 3D IOS datasets. Our method, termed TFormer, captures both local and global dependencies among different teeth to distinguish various types of teeth with divergent anatomical structures and confusing boundaries. Moreover, we design a geometry guided loss based on a novel point curvature to exploit boundary geometric features, which helps refine the boundary predictions for more accurate and smooth segmentation. We further employ a multi-task learning scheme, where an additional teeth-gingiva segmentation head is introduced to improve the performance. Extensive experimental results in a large-scale dataset with 16,000 IOS, the largest IOS dataset to our best knowledge, demonstrate that our TFormer can surpass existing state-of-the-art baselines with a large margin, with its utility in real-world scenarios verified by a clinical applicability test.