 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConformal Temporal Logic Planning using Large Language Models: Knowing When to Do What and When to Ask for Help
Sep 18, 2023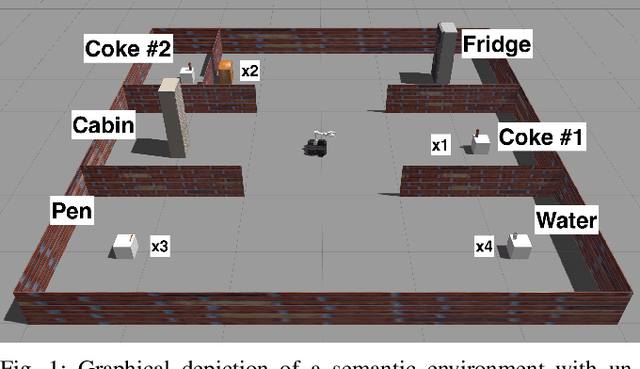
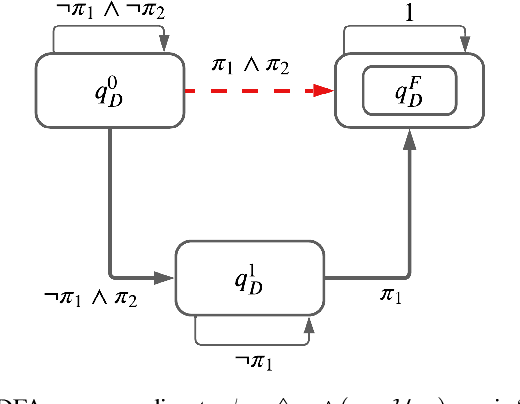

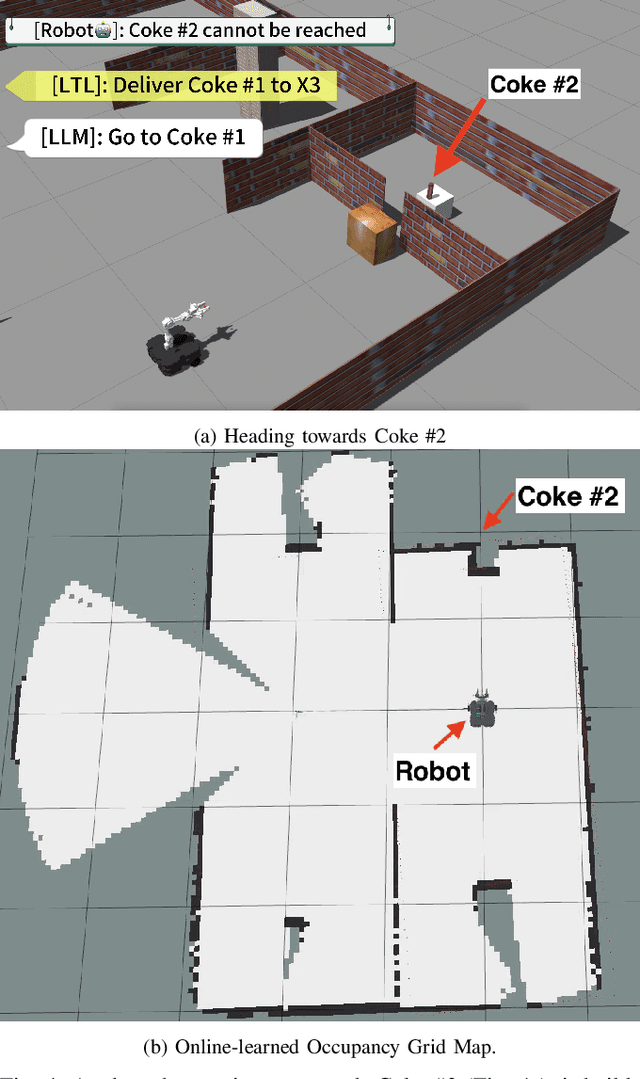
This paper addresses a new motion planning problem for mobile robots tasked with accomplishing multiple high-level sub-tasks, expressed using natural language (NL), in a temporal and logical order. To formally define such missions, we leverage LTL defined over NL-based atomic predicates modeling the considered NL-based sub-tasks. This is contrast to related planning approaches that define LTL tasks over atomic predicates capturing desired low-level system configurations. Our goal is to design robot plans that satisfy LTL tasks defined over NL-based atomic propositions. A novel technical challenge arising in this setup lies in reasoning about correctness of a robot plan with respect to such LTL-encoded tasks. To address this problem, we propose HERACLEs, a hierarchical conformal natural language planner, that relies on a novel integration of existing tools that include (i) automata theory to determine the NL-specified sub-task the robot should accomplish next to make mission progress; (ii) Large Language Models to design robot plans satisfying these sub-tasks; and (iii) conformal prediction to reason probabilistically about correctness of the designed plans and mission satisfaction and to determine if external assistance is required. We provide extensive comparative experiments on mobile manipulation tasks. The project website is ltl-llm.github.io.