 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-time Uncertainty Decomposition for Online Learning Control
Paper and Code
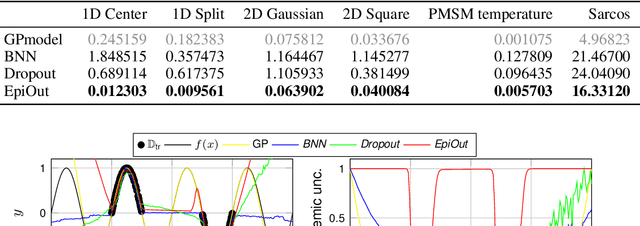
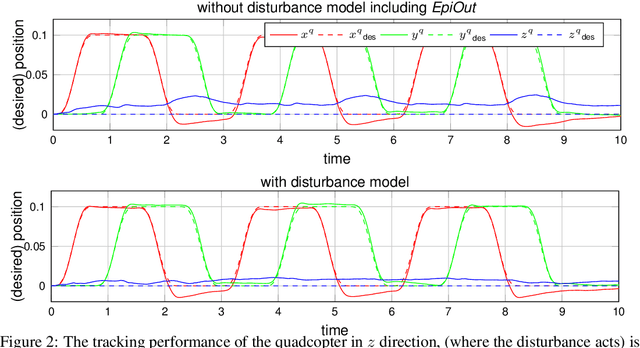


Safety-critical decisions based on machine learning models require a clear understanding of the involved uncertainties to avoid hazardous or risky situations. While aleatoric uncertainty can be explicitly modeled given a parametric description, epistemic uncertainty rather describes the presence or absence of training data. This paper proposes a novel generic method for modeling epistemic uncertainty and shows its advantages over existing approaches for neural networks on various data sets. It can be directly combined with aleatoric uncertainty estimates and allows for prediction in real-time as the inference is sample-free. We exploit this property in a model-based quadcopter control setting and demonstrate how the controller benefits from a differentiation between aleatoric and epistemic uncertainty in online learning of thermal disturbances.