 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUncertainty-Weighted Multi-Task CNN for Joint DoA and Rain-Rate Estimation Under Rain-Induced Array Distortions
Feb 02, 2026We investigate joint direction-of-arrival (DoA) and rain-rate estimation for a uniform linear array operating under rain-induced multiplicative distortions. Building on a wavefront fluctuation model whose spatial correlation is governed by the rain-rate, we derive an angle-dependent covariance formulation and use it to synthesize training data. DoA estimation is cast as a multi-label classification problem on a discretized angular grid, while rain-rate estimation is formulated as a multi-class classification task. We then propose a multi-task deep CNN with a shared feature extractor and two task-specific heads, trained using an uncertainty-weighted objective to automatically balance the two losses. Numerical results in a two-source scenario show that the proposed network achieves lower DoA RMSE than classical baselines and provides accurate rain-rate classification at moderate-to-high SNRs.
Decentralized No-Regret Frequency-Time Scheduling for FMCW Radar Interference Avoidance
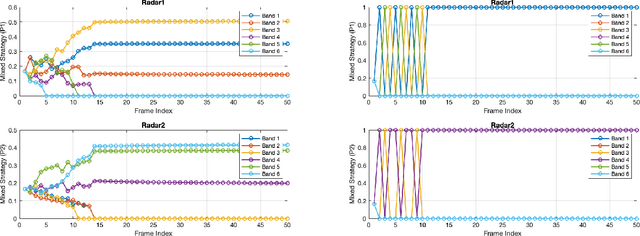
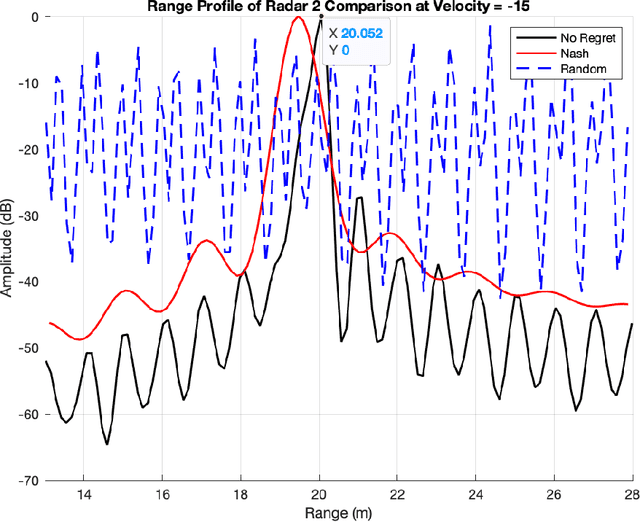
Dec 31, 2025Automotive FMCW radars are indispensable to modern ADAS and autonomous-driving systems, but their increasing density has intensified the risk of mutual interference. Existing mitigation techniques, including reactive receiver-side suppression, proactive waveform design, and cooperative scheduling, often face limitations in scalability, reliance on side-channel communication, or degradation of range-Doppler resolution. Building on our earlier work on decentralized Frequency-Domain No-Regret hopping, this paper introduces a unified time-frequency game-theoretic framework that enables radars to adapt across both spectral and temporal resources. We formulate the interference-avoidance problem as a repeated anti-coordination game, in which each radar autonomously updates a mixed strategy over frequency subbands and chirp-level time offsets using regret-minimization dynamics. We show that the proposed Time-Frequency No-Regret Hopping algorithm achieves vanishing external and swap regret, and that the induced empirical play converges to an $\varepsilon$-coarse correlated equilibrium or a correlated equilibrium. Theoretical analysis provides regret bounds in the joint domain, revealing how temporal adaptation implicitly regularizes frequency selection and enhances robustness against asynchronous interference. Numerical experiments with multi-radar scenarios demonstrate substantial improvements in SINR, collision rate, and range-Doppler quality compared with time-frequency random hopping and centralized Nash-based benchmarks.
Deep Frequency Attention Networks for Single Snapshot Sparse Array Interpolation
Mar 07, 2025Sparse arrays have been widely exploited in radar systems because of their advantages in achieving large array aperture at low hardware cost, while significantly reducing mutual coupling. However, sparse arrays suffer from high sidelobes which may lead to false detections. Missing elements in sparse arrays can be interpolated using the sparse array measurements. In snapshot-limited scenarios, such as automotive radar, it is challenging to utilize difference coarrays which require a large number of snapshots to construct a covariance matrix for interpolation. For single snapshot sparse array interpolation, traditional model-based methods, while effective, require expert knowledge for hyperparameter tuning, lack task-specific adaptability, and incur high computational costs. In this paper, we propose a novel deep learning-based single snapshot sparse array interpolation network that addresses these challenges by leveraging a frequency-domain attention mechanism. The proposed approach transforms the sparse signal into the frequency domain, where the attention mechanism focuses on key spectral regions, enabling improved interpolation of missing elements even in low signal-to-noise ratio (SNR) conditions. By minimizing computational costs and enhancing interpolation accuracy, the proposed method demonstrates superior performance compared to traditional approaches, making it well-suited for automotive radar applications.
A Game-Theoretic Approach for High-Resolution Automotive FMCW Radar Interference Avoidance
Mar 04, 2025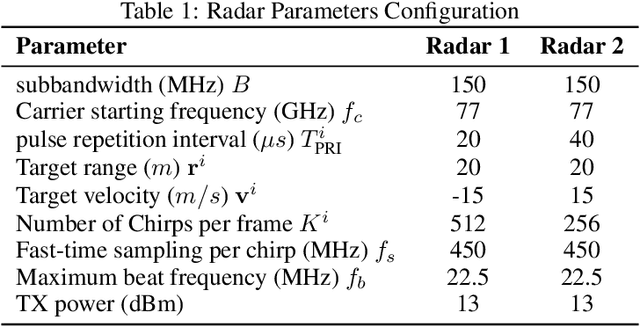
Nonlinear frequency hopping has emerged as a promising approach for mitigating interference and enhancing range resolution in automotive FMCW radar systems. Achieving an optimal balance between high range-resolution and effective interference mitigation remains challenging, especially without centralized frequency scheduling. This paper presents a game-theoretic framework for interference avoidance, in which each radar operates as an independent player, optimizing its performance through decentralized decision-making. We examine two equilibrium concepts--Nash Equilibrium (NE) and Coarse Correlated Equilibrium (CCE)--as strategies for frequency band allocation, with CCE demonstrating particular effectiveness through regret minimization algorithms. We propose two interference avoidance algorithms: Nash Hopping, a model-based approach, and No-Regret Hopping, a model-free adaptive method. Simulation results indicate that both methods effectively reduce interference and enhance the signal-to-interference-plus-noise ratio (SINR). Notably, No-regret Hopping further optimizes frequency spectrum utilization, achieving improved range resolution compared to Nash Hopping.
Signal Processing Challenges in Automotive Radar
Jan 13, 2025As automotive radars continue to proliferate, there is a continuous need for improved performance and several critical problems that need to be solved. All of this is driving research across industry and academia. This paper is an overview of research areas that are centered around signal processing. We discuss opportunities in the area of modulation schemes, interference avoidance, spatial resolution enhancement and application of deep learning. A rich list of references is provided. This paper should serve as a useful starting point for signal processing practitioners looking to work in the area of automotive radars.
Advancing Single-Snapshot DOA Estimation with Siamese Neural Networks for Sparse Linear Arrays
Jan 13, 2025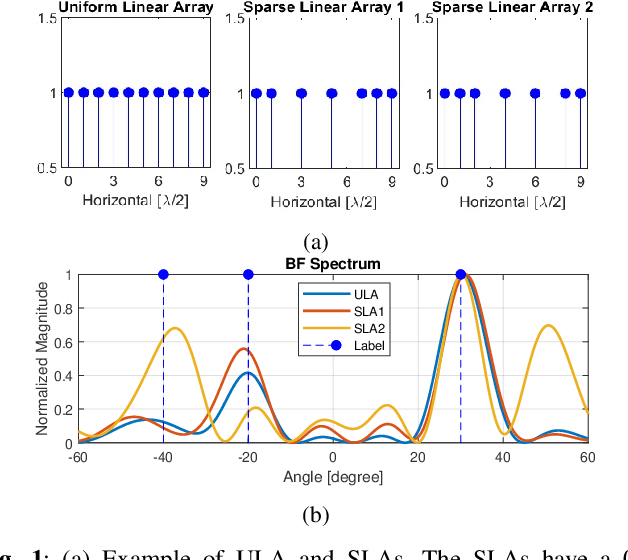
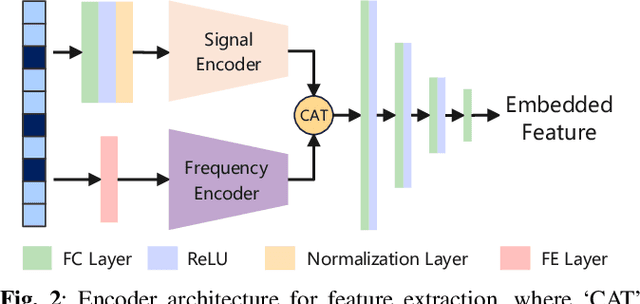
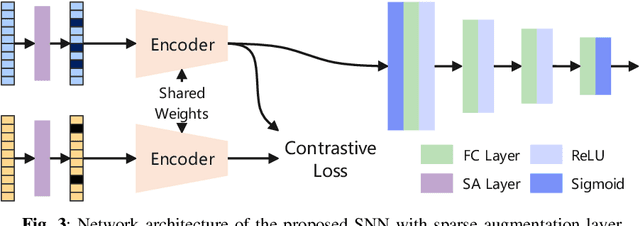
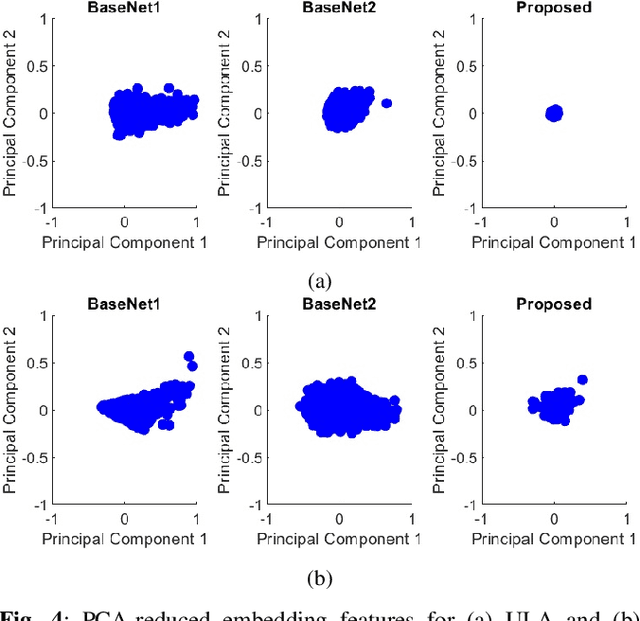
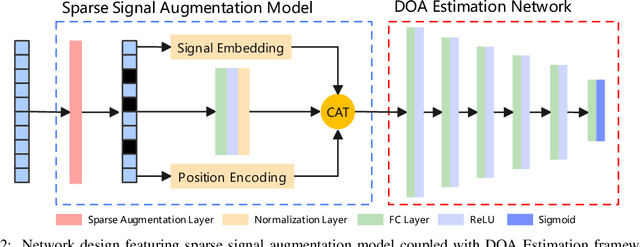
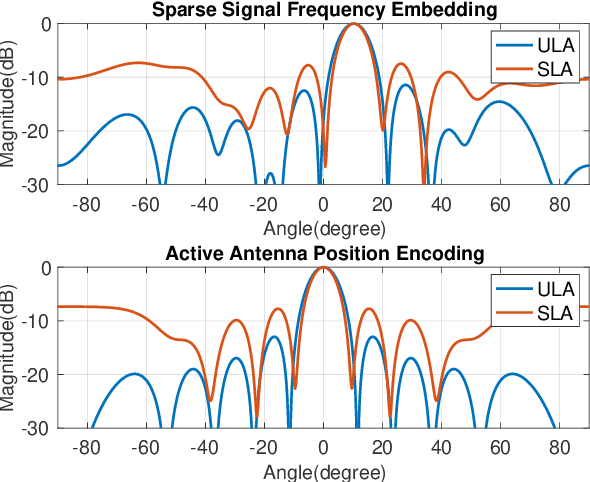
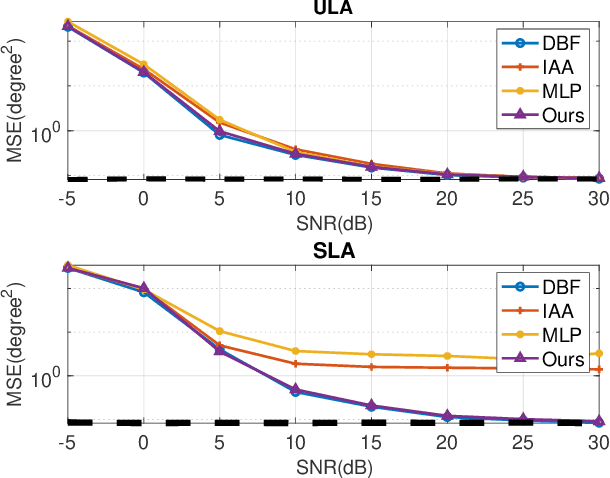
Single-snapshot signal processing in sparse linear arrays has become increasingly vital, particularly in dynamic environments like automotive radar systems, where only limited snapshots are available. These arrays are often utilized either to cut manufacturing costs or result from unintended antenna failures, leading to challenges such as high sidelobe levels and compromised accuracy in direction-of-arrival (DOA) estimation. Despite deep learning's success in tasks such as DOA estimation, the need for extensive training data to increase target numbers or improve angular resolution poses significant challenges. In response, this paper presents a novel Siamese neural network (SNN) featuring a sparse augmentation layer, which enhances signal feature embedding and DOA estimation accuracy in sparse arrays. We demonstrate the enhanced DOA estimation performance of our approach through detailed feature analysis and performance evaluation. The code for this study is available at https://github.com/ruxinzh/SNNS_SLA.
Enhancing Off-Grid One-Bit DOA Estimation with Learning-Based Sparse Bayesian Approach for Non-Uniform Sparse Array
Dec 14, 2024
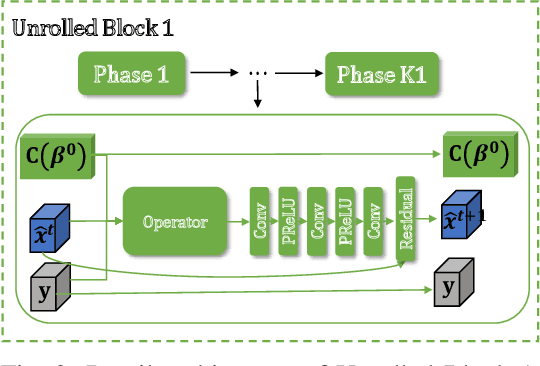
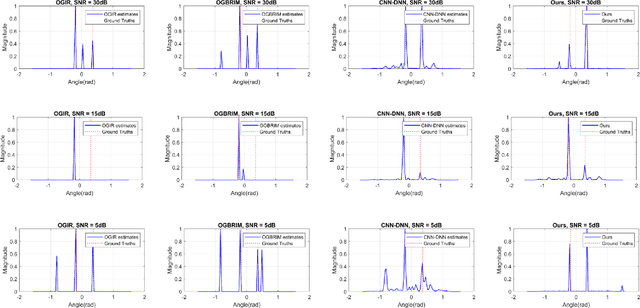
This paper tackles the challenge of one-bit off-grid direction of arrival (DOA) estimation in a single snapshot scenario based on a learning-based Bayesian approach. Firstly, we formulate the off-grid DOA estimation model, utilizing the first-order off-grid approximation, incorporating one-bit data quantization. Subsequently, we address this problem using the Sparse Bayesian based framework and solve iteratively. However, traditional Sparse Bayesian methods often face challenges such as high computational complexity and the need for extensive hyperparameter tuning. To balance estimation accuracy and computational efficiency, we propose a novel Learning-based Sparse Bayesian framework, which leverages an unrolled neural network architecture. This framework autonomously learns hyperparameters through supervised learning, offering more accurate off-grid DOA estimates and improved computational efficiency compared to some state-of-the-art methods. Furthermore, the proposed approach is applicable to both uniform linear arrays and non-uniform sparse arrays. Simulation results validate the effectiveness of the proposed framework.
Redefining Automotive Radar Imaging: A Domain-Informed 1D Deep Learning Approach for High-Resolution and Efficient Performance
Jun 11, 2024Millimeter-wave (mmWave) radars are indispensable for perception tasks of autonomous vehicles, thanks to their resilience in challenging weather conditions. Yet, their deployment is often limited by insufficient spatial resolution for precise semantic scene interpretation. Classical super-resolution techniques adapted from optical imaging inadequately address the distinct characteristics of radar signal data. In response, our study redefines radar imaging super-resolution as a one-dimensional (1D) signal super-resolution spectra estimation problem by harnessing the radar signal processing domain knowledge, introducing innovative data normalization and a domain-informed signal-to-noise ratio (SNR)-guided loss function. Our tailored deep learning network for automotive radar imaging exhibits remarkable scalability, parameter efficiency and fast inference speed, alongside enhanced performance in terms of radar imaging quality and resolution. Extensive testing confirms that our SR-SPECNet sets a new benchmark in producing high-resolution radar range-azimuth images, outperforming existing methods across varied antenna configurations and dataset sizes. Source code and new radar dataset will be made publicly available online.
Enhanced Automotive Radar Collaborative Sensing By Exploiting Constructive Interference
May 27, 2024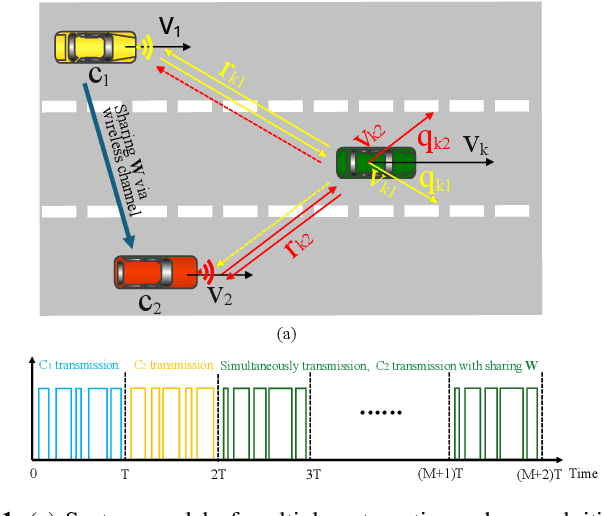
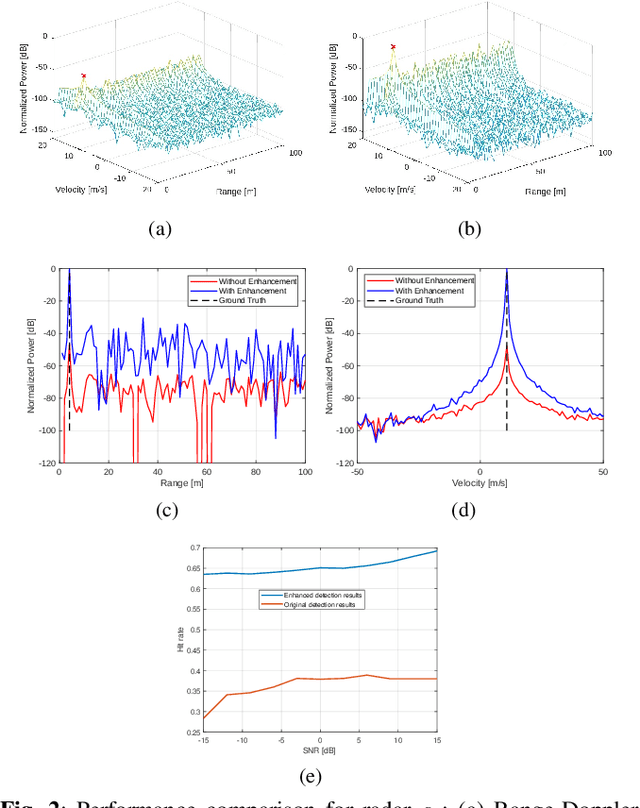
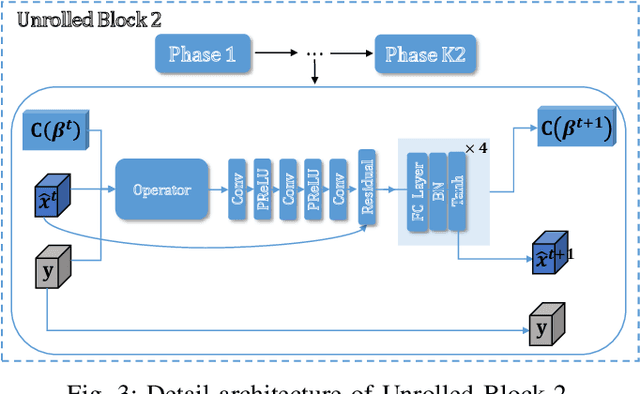
Automotive radar emerges as a crucial sensor for autonomous vehicle perception. As more cars are equipped radars, radar interference is an unavoidable challenge. Unlike conventional approaches such as interference mitigation and interference-avoiding technologies, this paper introduces an innovative collaborative sensing scheme with multiple automotive radars that exploits constructive interference. Through collaborative sensing, our method optimally aligns cross-path interference signals from other radars with another radar's self-echo signals, thereby significantly augmenting its target detection capabilities. This approach alleviates the need for extensive raw data sharing between collaborating radars. Instead, only an optimized weighting matrix needs to be exchanged between the radars. This approach considerably decreases the data bandwidth requirements for the wireless channel, making it a more feasible and practical solution for automotive radar collaboration. Numerical results demonstrate the effectiveness of the constructive interference approach for enhanced object detection capability.
Antenna Failure Resilience: Deep Learning-Enabled Robust DOA Estimation with Single Snapshot Sparse Arrays
May 05, 2024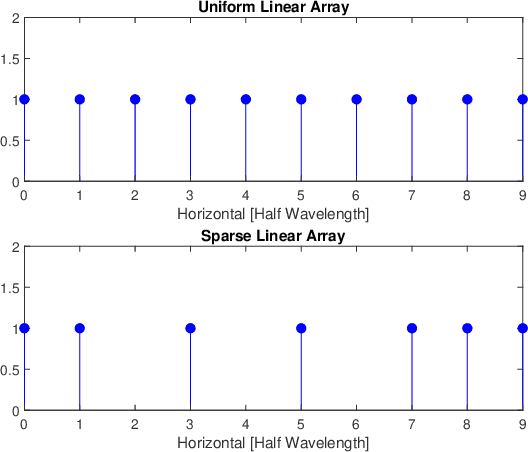
Recent advancements in Deep Learning (DL) for Direction of Arrival (DOA) estimation have highlighted its superiority over traditional methods, offering faster inference, enhanced super-resolution, and robust performance in low Signal-to-Noise Ratio (SNR) environments. Despite these advancements, existing research predominantly focuses on multi-snapshot scenarios, a limitation in the context of automotive radar systems which demand high angular resolution and often rely on limited snapshots, sometimes as scarce as a single snapshot. Furthermore, the increasing interest in sparse arrays for automotive radar, owing to their cost-effectiveness and reduced antenna element coupling, presents additional challenges including susceptibility to random sensor failures. This paper introduces a pioneering DL framework featuring a sparse signal augmentation layer, meticulously crafted to bolster single snapshot DOA estimation across diverse sparse array setups and amidst antenna failures. To our best knowledge, this is the first work to tackle this issue. Our approach improves the adaptability of deep learning techniques to overcome the unique difficulties posed by sparse arrays with single snapshot. We conduct thorough evaluations of our network's performance using simulated and real-world data, showcasing the efficacy and real-world viability of our proposed solution. The code and real-world dataset employed in this study are available at https://github.com/ruxinzh/Deep_RSA_DOA.