 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePerformance Evaluation and Analysis of Thresholding-based Interference Mitigation for Automotive Radar Systems
Feb 21, 2024In automotive radar, time-domain thresholding (TD-TH) and time-frequency domain thresholding (TFD-TH) are crucial techniques underpinning numerous interference mitigation methods. Despite their importance, comprehensive evaluations of these methods in dense traffic scenarios with different types of interference are limited. In this study, we segment automotive radar interference into three distinct categories. Utilizing the in-house traffic scenario and automotive radar simulator, we evaluate interference mitigation methods across multiple metrics: probability of detection, signal-to-interference-plus-noise ratio, and phase error involving hundreds of targets and dozens of interfering radars. The numerical results highlight that TFD-TH is more effective than TD-TH, particularly as the density and signal correlation of interfering radars escalate.
Bayesian Linear Regression with Cauchy Prior and Its Application in Sparse MIMO Radar
Jul 20, 2023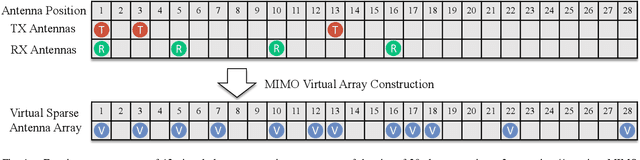
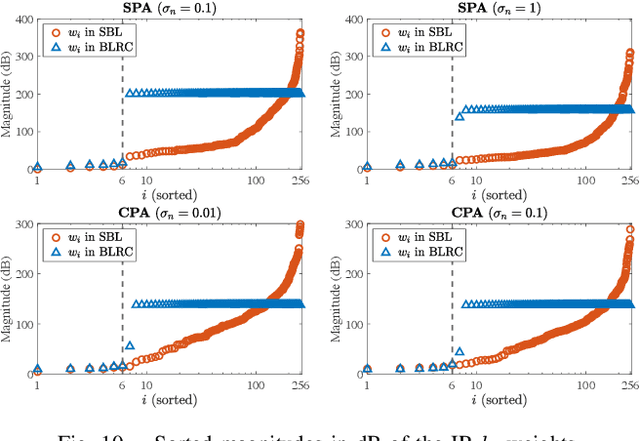
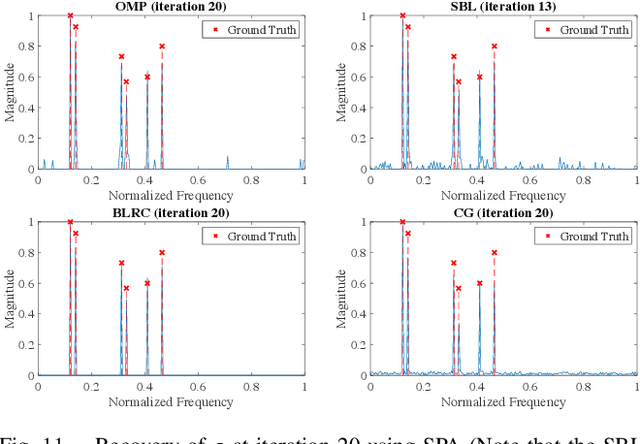
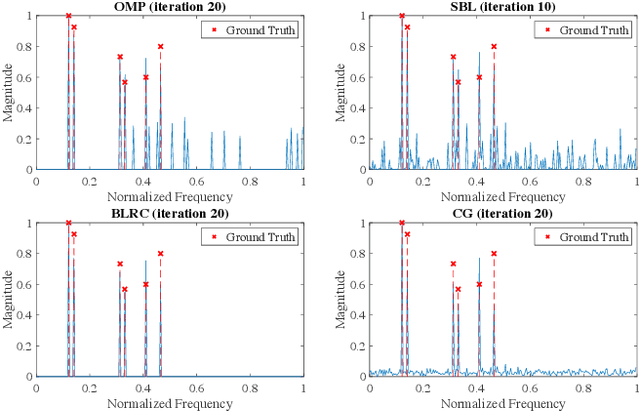
In this paper, a sparse signal recovery algorithm using Bayesian linear regression with Cauchy prior (BLRC) is proposed. Utilizing an approximate expectation maximization(AEM) scheme, a systematic hyper-parameter updating strategy is developed to make BLRC practical in highly dynamic scenarios. Remarkably, with a more compact latent space, BLRC not only possesses essential features of the well-known sparse Bayesian learning (SBL) and iterative reweighted l2 (IR-l2) algorithms but also outperforms them. Using sparse array (SPA) and coprime array (CPA), numerical analyses are first performed to show the superior performance of BLRC under various noise levels, array sizes, and sparsity levels. Applications of BLRC to sparse multiple-input and multiple-output (MIMO) radar array signal processing are then carried out to show that the proposed BLRC can efficiently produce high-resolution images of the targets.
ERASE-Net: Efficient Segmentation Networks for Automotive Radar Signals
Sep 26, 2022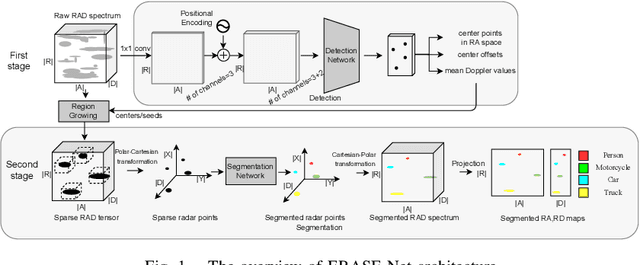


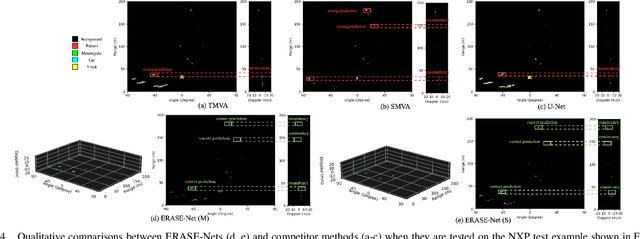
Among various sensors for assisted and autonomous driving systems, automotive radar has been considered as a robust and low-cost solution even in adverse weather or lighting conditions. With the recent development of radar technologies and open-sourced annotated data sets, semantic segmentation with radar signals has become very promising. However, existing methods are either computationally expensive or discard significant amounts of valuable information from raw 3D radar signals by reducing them to 2D planes via averaging. In this work, we introduce ERASE-Net, an Efficient RAdar SEgmentation Network to segment the raw radar signals semantically. The core of our approach is the novel detect-then-segment method for raw radar signals. It first detects the center point of each object, then extracts a compact radar signal representation, and finally performs semantic segmentation. We show that our method can achieve superior performance on radar semantic segmentation task compared to the state-of-the-art (SOTA) technique. Furthermore, our approach requires up to 20x less computational resources. Finally, we show that the proposed ERASE-Net can be compressed by 40% without significant loss in performance, significantly more than the SOTA network, which makes it a more promising candidate for practical automotive applications.