 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Generative Models for Bayesian Inference on High-Rate Sensor Data: Applications in Automotive Radar and Medical Imaging
Apr 16, 2025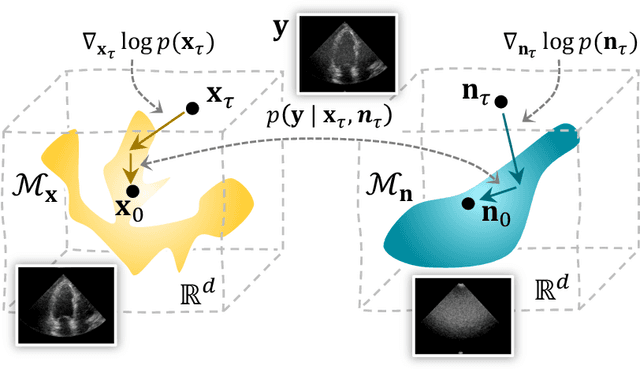
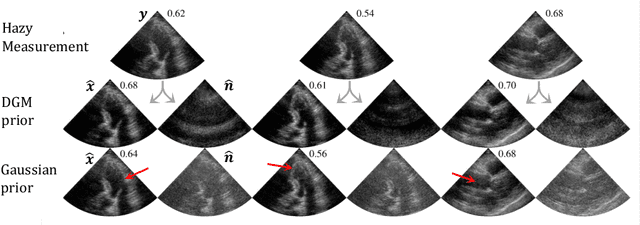
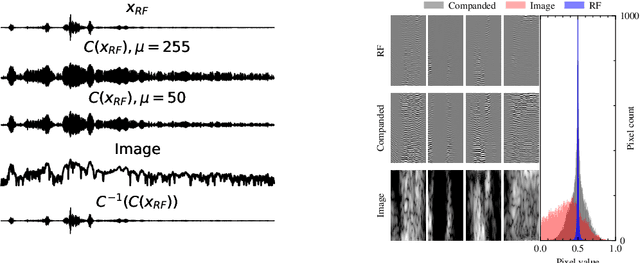
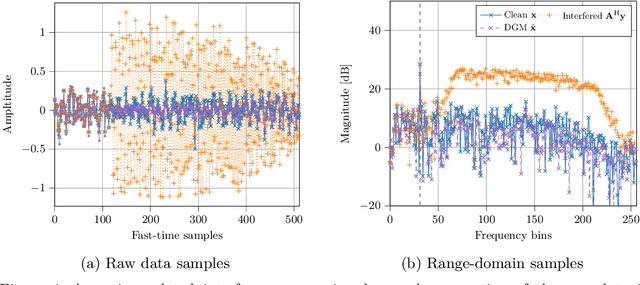
Deep generative models have been studied and developed primarily in the context of natural images and computer vision. This has spurred the development of (Bayesian) methods that use these generative models for inverse problems in image restoration, such as denoising, inpainting, and super-resolution. In recent years, generative modeling for Bayesian inference on sensory data has also gained traction. Nevertheless, the direct application of generative modeling techniques initially designed for natural images on raw sensory data is not straightforward, requiring solutions that deal with high dynamic range signals acquired from multiple sensors or arrays of sensors that interfere with each other, and that typically acquire data at a very high rate. Moreover, the exact physical data-generating process is often complex or unknown. As a consequence, approximate models are used, resulting in discrepancies between model predictions and the observations that are non-Gaussian, in turn complicating the Bayesian inverse problem. Finally, sensor data is often used in real-time processing or decision-making systems, imposing stringent requirements on, e.g., latency and throughput. In this paper, we will discuss some of these challenges and offer approaches to address them, all in the context of high-rate real-time sensing applications in automotive radar and medical imaging.
Performance Evaluation and Analysis of Thresholding-based Interference Mitigation for Automotive Radar Systems
Feb 21, 2024In automotive radar, time-domain thresholding (TD-TH) and time-frequency domain thresholding (TFD-TH) are crucial techniques underpinning numerous interference mitigation methods. Despite their importance, comprehensive evaluations of these methods in dense traffic scenarios with different types of interference are limited. In this study, we segment automotive radar interference into three distinct categories. Utilizing the in-house traffic scenario and automotive radar simulator, we evaluate interference mitigation methods across multiple metrics: probability of detection, signal-to-interference-plus-noise ratio, and phase error involving hundreds of targets and dozens of interfering radars. The numerical results highlight that TFD-TH is more effective than TD-TH, particularly as the density and signal correlation of interfering radars escalate.