 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecentralized No-Regret Frequency-Time Scheduling for FMCW Radar Interference Avoidance
Dec 31, 2025Automotive FMCW radars are indispensable to modern ADAS and autonomous-driving systems, but their increasing density has intensified the risk of mutual interference. Existing mitigation techniques, including reactive receiver-side suppression, proactive waveform design, and cooperative scheduling, often face limitations in scalability, reliance on side-channel communication, or degradation of range-Doppler resolution. Building on our earlier work on decentralized Frequency-Domain No-Regret hopping, this paper introduces a unified time-frequency game-theoretic framework that enables radars to adapt across both spectral and temporal resources. We formulate the interference-avoidance problem as a repeated anti-coordination game, in which each radar autonomously updates a mixed strategy over frequency subbands and chirp-level time offsets using regret-minimization dynamics. We show that the proposed Time-Frequency No-Regret Hopping algorithm achieves vanishing external and swap regret, and that the induced empirical play converges to an $\varepsilon$-coarse correlated equilibrium or a correlated equilibrium. Theoretical analysis provides regret bounds in the joint domain, revealing how temporal adaptation implicitly regularizes frequency selection and enhances robustness against asynchronous interference. Numerical experiments with multi-radar scenarios demonstrate substantial improvements in SINR, collision rate, and range-Doppler quality compared with time-frequency random hopping and centralized Nash-based benchmarks.
A Game-Theoretic Approach for High-Resolution Automotive FMCW Radar Interference Avoidance
Mar 04, 2025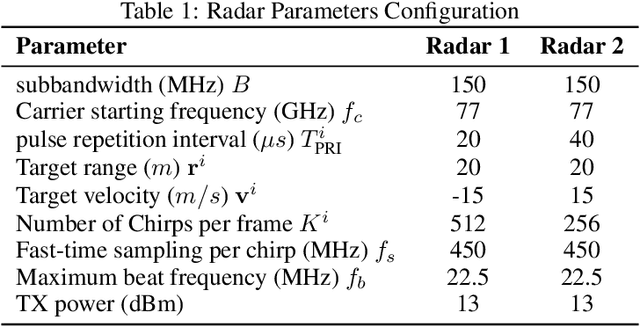
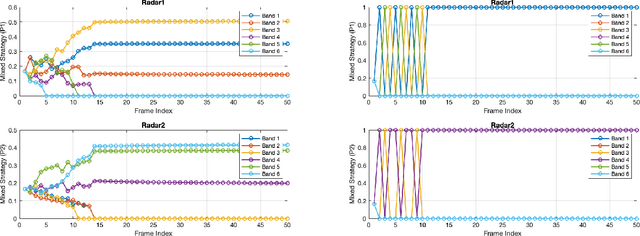
Nonlinear frequency hopping has emerged as a promising approach for mitigating interference and enhancing range resolution in automotive FMCW radar systems. Achieving an optimal balance between high range-resolution and effective interference mitigation remains challenging, especially without centralized frequency scheduling. This paper presents a game-theoretic framework for interference avoidance, in which each radar operates as an independent player, optimizing its performance through decentralized decision-making. We examine two equilibrium concepts--Nash Equilibrium (NE) and Coarse Correlated Equilibrium (CCE)--as strategies for frequency band allocation, with CCE demonstrating particular effectiveness through regret minimization algorithms. We propose two interference avoidance algorithms: Nash Hopping, a model-based approach, and No-Regret Hopping, a model-free adaptive method. Simulation results indicate that both methods effectively reduce interference and enhance the signal-to-interference-plus-noise ratio (SINR). Notably, No-regret Hopping further optimizes frequency spectrum utilization, achieving improved range resolution compared to Nash Hopping.
Enhanced Automotive Radar Collaborative Sensing By Exploiting Constructive Interference
May 27, 2024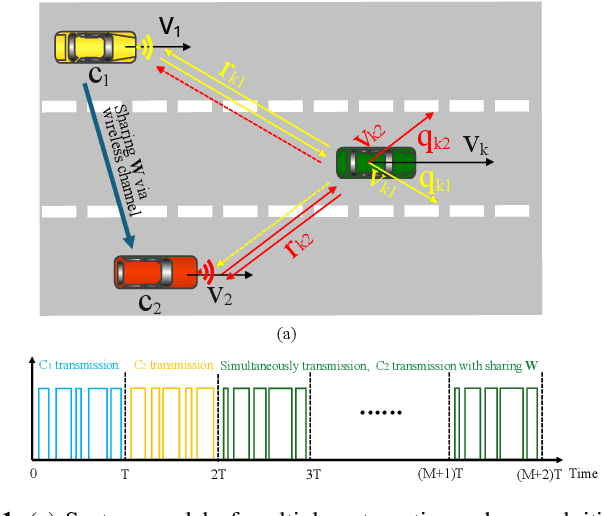
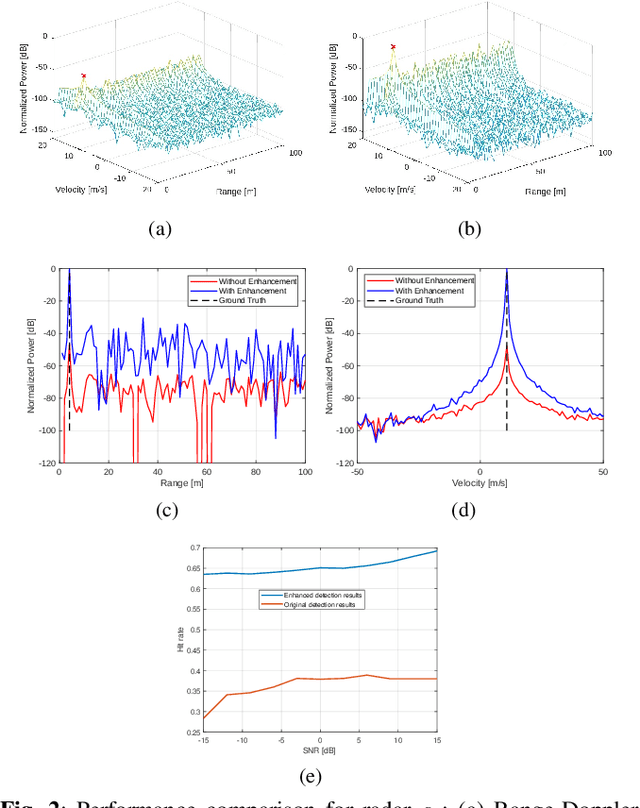
Automotive radar emerges as a crucial sensor for autonomous vehicle perception. As more cars are equipped radars, radar interference is an unavoidable challenge. Unlike conventional approaches such as interference mitigation and interference-avoiding technologies, this paper introduces an innovative collaborative sensing scheme with multiple automotive radars that exploits constructive interference. Through collaborative sensing, our method optimally aligns cross-path interference signals from other radars with another radar's self-echo signals, thereby significantly augmenting its target detection capabilities. This approach alleviates the need for extensive raw data sharing between collaborating radars. Instead, only an optimized weighting matrix needs to be exchanged between the radars. This approach considerably decreases the data bandwidth requirements for the wireless channel, making it a more feasible and practical solution for automotive radar collaboration. Numerical results demonstrate the effectiveness of the constructive interference approach for enhanced object detection capability.