 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Passive Observer to Active Critic: Reinforcement Learning Elicits Process Reasoning for Robotic Manipulation
Mar 16, 2026Accurate process supervision remains a critical challenge for long-horizon robotic manipulation. A primary bottleneck is that current video MLLMs, trained primarily under a Supervised Fine-Tuning (SFT) paradigm, function as passive "Observers" that recognize ongoing events rather than evaluating the current state relative to the final task goal. In this paper, we introduce PRIMO R1 (Process Reasoning Induced Monitoring), a 7B framework that transforms video MLLMs into active "Critics". We leverage outcome-based Reinforcement Learning to incentivize explicit Chain-of-Thought generation for progress estimation. Furthermore, our architecture constructs a structured temporal input by explicitly anchoring the video sequence between initial and current state images. Supported by the proposed PRIMO Dataset and Benchmark, extensive experiments across diverse in-domain environments and out-of-domain real-world humanoid scenarios demonstrate that PRIMO R1 achieves state-of-the-art performance. Quantitatively, our 7B model achieves a 50% reduction in the mean absolute error of specialized reasoning baselines, demonstrating significant relative accuracy improvements over 72B-scale general MLLMs. Furthermore, PRIMO R1 exhibits strong zero-shot generalization on difficult failure detection tasks. We establish state-of-the-art performance on RoboFail benchmark with 67.0% accuracy, surpassing closed-source models like OpenAI o1 by 6.0%.
CEI: A Unified Interface for Cross-Embodiment Visuomotor Policy Learning in 3D Space
Jan 14, 2026Robotic foundation models trained on large-scale manipulation datasets have shown promise in learning generalist policies, but they often overfit to specific viewpoints, robot arms, and especially parallel-jaw grippers due to dataset biases. To address this limitation, we propose Cross-Embodiment Interface (\CEI), a framework for cross-embodiment learning that enables the transfer of demonstrations across different robot arm and end-effector morphologies. \CEI introduces the concept of \textit{functional similarity}, which is quantified using Directional Chamfer Distance. Then it aligns robot trajectories through gradient-based optimization, followed by synthesizing observations and actions for unseen robot arms and end-effectors. In experiments, \CEI transfers data and policies from a Franka Panda robot to \textbf{16} different embodiments across \textbf{3} tasks in simulation, and supports bidirectional transfer between a UR5+AG95 gripper robot and a UR5+Xhand robot across \textbf{6} real-world tasks, achieving an average transfer ratio of 82.4\%. Finally, we demonstrate that \CEI can also be extended with spatial generalization and multimodal motion generation capabilities using our proposed techniques. Project website: https://cross-embodiment-interface.github.io/
MoiréTac: A Dual-Mode Visuotactile Sensor for Multidimensional Perception Using Moiré Pattern Amplification
Sep 16, 2025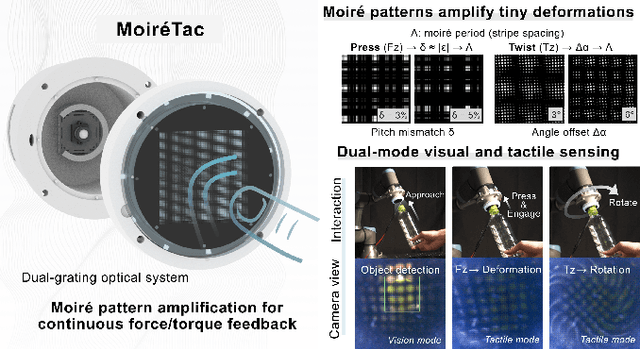
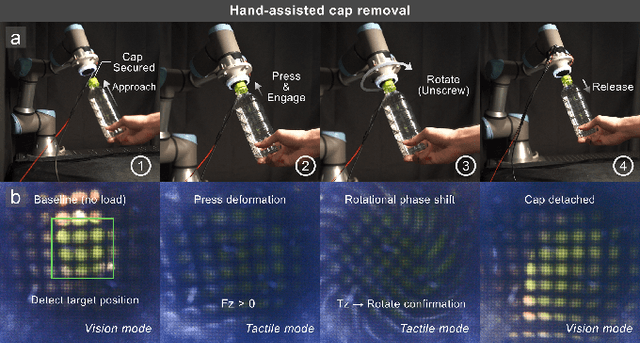
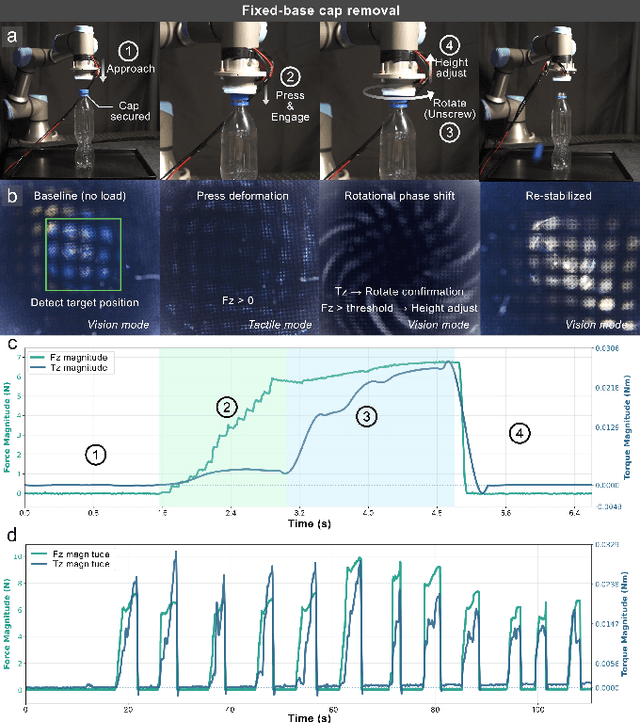
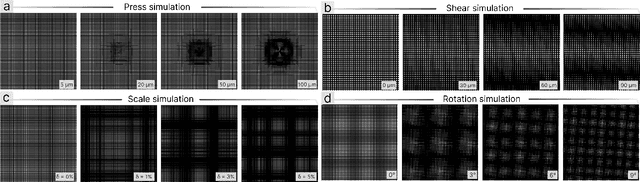
Visuotactile sensors typically employ sparse marker arrays that limit spatial resolution and lack clear analytical force-to-image relationships. To solve this problem, we present \textbf{Moir\'eTac}, a dual-mode sensor that generates dense interference patterns via overlapping micro-gratings within a transparent architecture. When two gratings overlap with misalignment, they create moir\'e patterns that amplify microscopic deformations. The design preserves optical clarity for vision tasks while producing continuous moir\'e fields for tactile sensing, enabling simultaneous 6-axis force/torque measurement, contact localization, and visual perception. We combine physics-based features (brightness, phase gradient, orientation, and period) from moir\'e patterns with deep spatial features. These are mapped to 6-axis force/torque measurements, enabling interpretable regression through end-to-end learning. Experimental results demonstrate three capabilities: force/torque measurement with R^2 > 0.98 across tested axes; sensitivity tuning through geometric parameters (threefold gain adjustment); and vision functionality for object classification despite moir\'e overlay. Finally, we integrate the sensor into a robotic arm for cap removal with coordinated force and torque control, validating its potential for dexterous manipulation.
VET: A Visual-Electronic Tactile System for Immersive Human-Machine Interaction
Apr 01, 2025In the pursuit of deeper immersion in human-machine interaction, achieving higher-dimensional tactile input and output on a single interface has become a key research focus. This study introduces the Visual-Electronic Tactile (VET) System, which builds upon vision-based tactile sensors (VBTS) and integrates electrical stimulation feedback to enable bidirectional tactile communication. We propose and implement a system framework that seamlessly integrates an electrical stimulation film with VBTS using a screen-printing preparation process, eliminating interference from traditional methods. While VBTS captures multi-dimensional input through visuotactile signals, electrical stimulation feedback directly stimulates neural pathways, preventing interference with visuotactile information. The potential of the VET system is demonstrated through experiments on finger electrical stimulation sensitivity zones, as well as applications in interactive gaming and robotic arm teleoperation. This system paves the way for new advancements in bidirectional tactile interaction and its broader applications.
AVR: Active Vision-Driven Robotic Precision Manipulation with Viewpoint and Focal Length Optimization
Mar 03, 2025Robotic manipulation within dynamic environments presents challenges to precise control and adaptability. Traditional fixed-view camera systems face challenges adapting to change viewpoints and scale variations, limiting perception and manipulation precision. To tackle these issues, we propose the Active Vision-driven Robotic (AVR) framework, a teleoperation hardware solution that supports dynamic viewpoint and dynamic focal length adjustments to continuously center targets and maintain optimal scale, accompanied by a corresponding algorithm that effectively enhances the success rates of various operational tasks. Using the RoboTwin platform with a real-time image processing plugin, AVR framework improves task success rates by 5%-16% on five manipulation tasks. Physical deployment on a dual-arm system demonstrates in collaborative tasks and 36% precision in screwdriver insertion, outperforming baselines by over 25%. Experimental results confirm that AVR framework enhances environmental perception, manipulation repeatability (40% $\le $1 cm error), and robustness in complex scenarios, paving the way for future robotic precision manipulation methods in the pursuit of human-level robot dexterity and precision.
Exo-ViHa: A Cross-Platform Exoskeleton System with Visual and Haptic Feedback for Efficient Dexterous Skill Learning
Mar 03, 2025Imitation learning has emerged as a powerful paradigm for robot skills learning. However, traditional data collection systems for dexterous manipulation face challenges, including a lack of balance between acquisition efficiency, consistency, and accuracy. To address these issues, we introduce Exo-ViHa, an innovative 3D-printed exoskeleton system that enables users to collect data from a first-person perspective while providing real-time haptic feedback. This system combines a 3D-printed modular structure with a slam camera, a motion capture glove, and a wrist-mounted camera. Various dexterous hands can be installed at the end, enabling it to simultaneously collect the posture of the end effector, hand movements, and visual data. By leveraging the first-person perspective and direct interaction, the exoskeleton enhances the task realism and haptic feedback, improving the consistency between demonstrations and actual robot deployments. In addition, it has cross-platform compatibility with various robotic arms and dexterous hands. Experiments show that the system can significantly improve the success rate and efficiency of data collection for dexterous manipulation tasks.
Dual-modal Tactile E-skin: Enabling Bidirectional Human-Robot Interaction via Integrated Tactile Perception and Feedback
Feb 08, 2024



To foster an immersive and natural human-robot interaction, the implementation of tactile perception and feedback becomes imperative, effectively bridging the conventional sensory gap. In this paper, we propose a dual-modal electronic skin (e-skin) that integrates magnetic tactile sensing and vibration feedback for enhanced human-robot interaction. The dual-modal tactile e-skin offers multi-functional tactile sensing and programmable haptic feedback, underpinned by a layered structure comprised of flexible magnetic films, soft silicone, a Hall sensor and actuator array, and a microcontroller unit. The e-skin captures the magnetic field changes caused by subtle deformations through Hall sensors, employing deep learning for accurate tactile perception. Simultaneously, the actuator array generates mechanical vibrations to facilitate haptic feedback, delivering diverse mechanical stimuli. Notably, the dual-modal e-skin is capable of transmitting tactile information bidirectionally, enabling object recognition and fine-weighing operations. This bidirectional tactile interaction framework will enhance the immersion and efficiency of interactions between humans and robots.
SATac: A Thermoluminescence Enabled Tactile Sensor for Concurrent Perception of Temperature, Pressure, and Shear
Feb 01, 2024
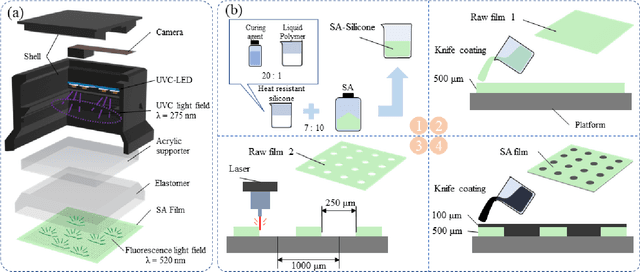


Most vision-based tactile sensors use elastomer deformation to infer tactile information, which can not sense some modalities, like temperature. As an important part of human tactile perception, temperature sensing can help robots better interact with the environment. In this work, we propose a novel multimodal vision-based tactile sensor, SATac, which can simultaneously perceive information of temperature, pressure, and shear. SATac utilizes thermoluminescence of strontium aluminate (SA) to sense a wide range of temperatures with exceptional resolution. Additionally, the pressure and shear can also be perceived by analyzing Voronoi diagram. A series of experiments are conducted to verify the performance of our proposed sensor. We also discuss the possible application scenarios and demonstrate how SATac could benefit robot perception capabilities.