 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKling-MotionControl Technical Report
Mar 03, 2026Character animation aims to generate lifelike videos by transferring motion dynamics from a driving video to a reference image. Recent strides in generative models have paved the way for high-fidelity character animation. In this work, we present Kling-MotionControl, a unified DiT-based framework engineered specifically for robust, precise, and expressive holistic character animation. Leveraging a divide-and-conquer strategy within a cohesive system, the model orchestrates heterogeneous motion representations tailored to the distinct characteristics of body, face, and hands, effectively reconciling large-scale structural stability with fine-grained articulatory expressiveness. To ensure robust cross-identity generalization, we incorporate adaptive identity-agnostic learning, facilitating natural motion retargeting for diverse characters ranging from realistic humans to stylized cartoons. Simultaneously, we guarantee faithful appearance preservation through meticulous identity injection and fusion designs, further supported by a subject library mechanism that leverages comprehensive reference contexts. To ensure practical utility, we implement an advanced acceleration framework utilizing multi-stage distillation, boosting inference speed by over 10x. Kling-MotionControl distinguishes itself through intelligent semantic motion understanding and precise text responsiveness, allowing for flexible control beyond visual inputs. Human preference evaluations demonstrate that Kling-MotionControl delivers superior performance compared to leading commercial and open-source solutions, achieving exceptional fidelity in holistic motion control, open domain generalization, and visual quality and coherence. These results establish Kling-MotionControl as a robust solution for high-quality, controllable, and lifelike character animation.
Point-Wise Vibration Pattern Production via a Sparse Actuator Array for Surface Tactile Feedback
Feb 18, 2024
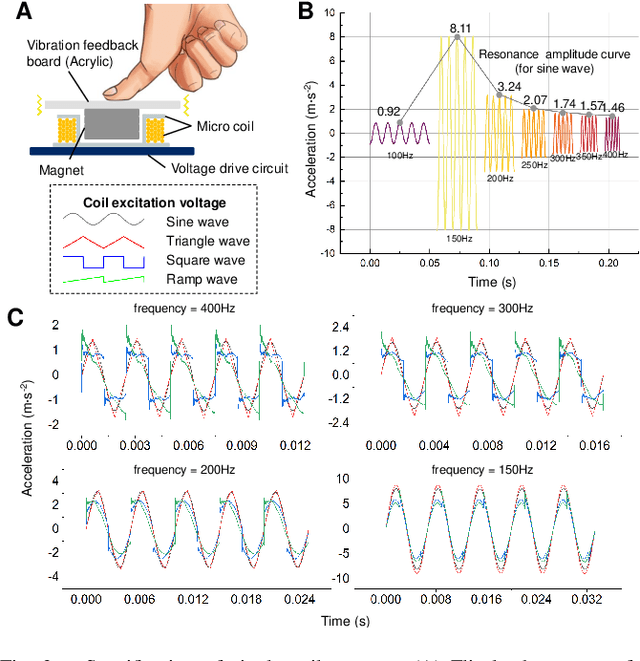


Surface vibration tactile feedback is capable of conveying various semantic information to humans via the handheld electronic devices, like smartphone, touch panel,and game controller. However, covering the whole device contacting surface with dense actuator arrangement can affect its normal use, how to produce desired vibration patterns at any contact point with only several sparse actuators deployed on the handled device surface remains a significant challenge. In this work, we develop a tactile feedback board with only five actuators in the size of a smartphone, and achieve the precise vibration pattern production that can focus at any desired position all over the board. Specifically, we investigate the vibration characteristics of single passive coil actuator, and construct its vibration pattern model at any position on the feedback board surface. Optimal phase and amplitude modulation, found with the simulated annealing algorithm, is employed with five actuators in a sparse array. And all actuators' vibration patterns are superimposed linearly to synthetically generate different onboard vibration energy distribution for tactile sensing. Experiments demonstrated that for point-wise vibration pattern production on our tactile board achieved an average level of about 0.9 in the Structural Similarity Index Measure (SSIM) evaluation, when compared to the ideal single-point-focused target vibration pattern. The sparse actuator array can be easily embedded into usual handheld electronic devices, which shows a good significant implication for enriching their haptic interaction functionalities.
Dual-modal Tactile E-skin: Enabling Bidirectional Human-Robot Interaction via Integrated Tactile Perception and Feedback
Feb 08, 2024



To foster an immersive and natural human-robot interaction, the implementation of tactile perception and feedback becomes imperative, effectively bridging the conventional sensory gap. In this paper, we propose a dual-modal electronic skin (e-skin) that integrates magnetic tactile sensing and vibration feedback for enhanced human-robot interaction. The dual-modal tactile e-skin offers multi-functional tactile sensing and programmable haptic feedback, underpinned by a layered structure comprised of flexible magnetic films, soft silicone, a Hall sensor and actuator array, and a microcontroller unit. The e-skin captures the magnetic field changes caused by subtle deformations through Hall sensors, employing deep learning for accurate tactile perception. Simultaneously, the actuator array generates mechanical vibrations to facilitate haptic feedback, delivering diverse mechanical stimuli. Notably, the dual-modal e-skin is capable of transmitting tactile information bidirectionally, enabling object recognition and fine-weighing operations. This bidirectional tactile interaction framework will enhance the immersion and efficiency of interactions between humans and robots.