 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeformNet: Latent Space Modeling and Dynamics Prediction for Deformable Object Manipulation
Feb 12, 2024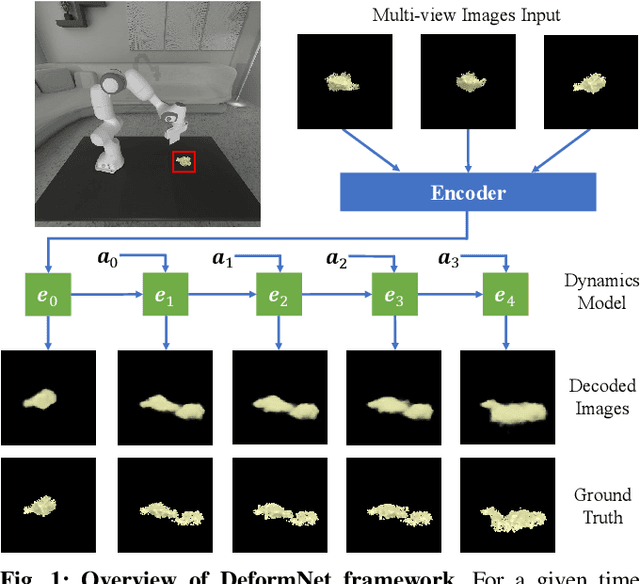
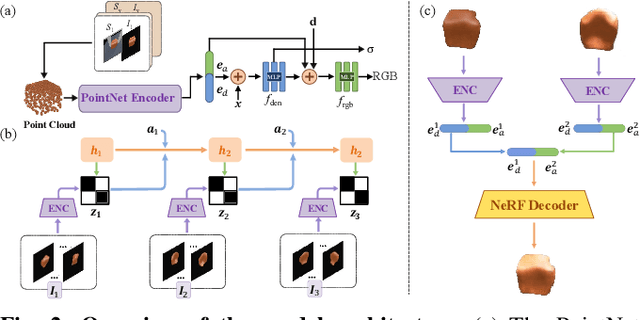
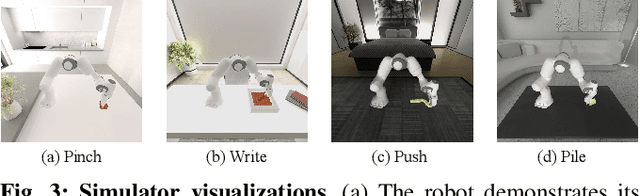
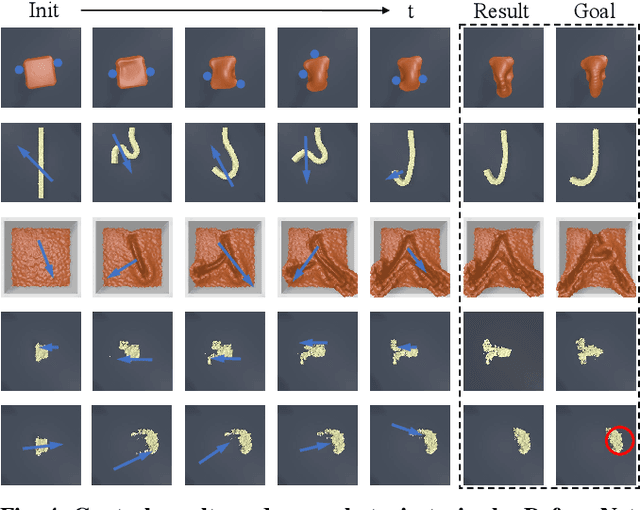
Manipulating deformable objects is a ubiquitous task in household environments, demanding adequate representation and accurate dynamics prediction due to the objects' infinite degrees of freedom. This work proposes DeformNet, which utilizes latent space modeling with a learned 3D representation model to tackle these challenges effectively. The proposed representation model combines a PointNet encoder and a conditional neural radiance field (NeRF), facilitating a thorough acquisition of object deformations and variations in lighting conditions. To model the complex dynamics, we employ a recurrent state-space model (RSSM) that accurately predicts the transformation of the latent representation over time. Extensive simulation experiments with diverse objectives demonstrate the generalization capabilities of DeformNet for various deformable object manipulation tasks, even in the presence of previously unseen goals. Finally, we deploy DeformNet on an actual UR5 robotic arm to demonstrate its capability in real-world scenarios.
Dual-modal Tactile E-skin: Enabling Bidirectional Human-Robot Interaction via Integrated Tactile Perception and Feedback
Feb 08, 2024



To foster an immersive and natural human-robot interaction, the implementation of tactile perception and feedback becomes imperative, effectively bridging the conventional sensory gap. In this paper, we propose a dual-modal electronic skin (e-skin) that integrates magnetic tactile sensing and vibration feedback for enhanced human-robot interaction. The dual-modal tactile e-skin offers multi-functional tactile sensing and programmable haptic feedback, underpinned by a layered structure comprised of flexible magnetic films, soft silicone, a Hall sensor and actuator array, and a microcontroller unit. The e-skin captures the magnetic field changes caused by subtle deformations through Hall sensors, employing deep learning for accurate tactile perception. Simultaneously, the actuator array generates mechanical vibrations to facilitate haptic feedback, delivering diverse mechanical stimuli. Notably, the dual-modal e-skin is capable of transmitting tactile information bidirectionally, enabling object recognition and fine-weighing operations. This bidirectional tactile interaction framework will enhance the immersion and efficiency of interactions between humans and robots.