 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePoint-Wise Vibration Pattern Production via a Sparse Actuator Array for Surface Tactile Feedback
Feb 18, 2024
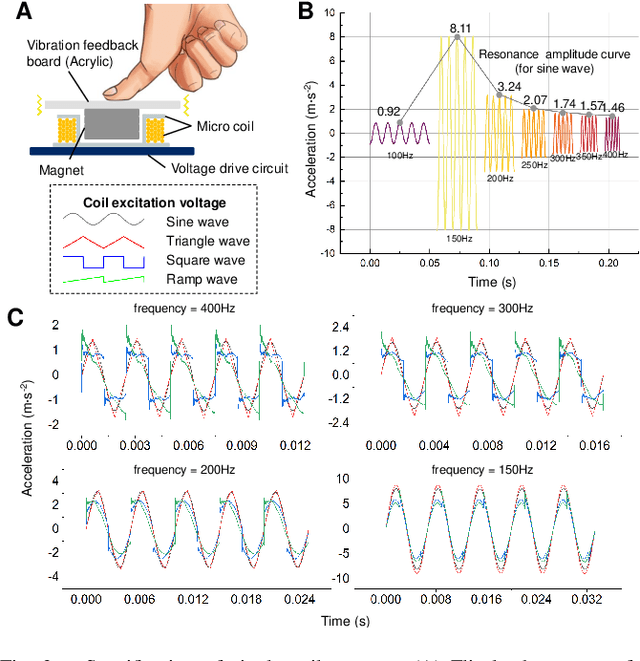


Surface vibration tactile feedback is capable of conveying various semantic information to humans via the handheld electronic devices, like smartphone, touch panel,and game controller. However, covering the whole device contacting surface with dense actuator arrangement can affect its normal use, how to produce desired vibration patterns at any contact point with only several sparse actuators deployed on the handled device surface remains a significant challenge. In this work, we develop a tactile feedback board with only five actuators in the size of a smartphone, and achieve the precise vibration pattern production that can focus at any desired position all over the board. Specifically, we investigate the vibration characteristics of single passive coil actuator, and construct its vibration pattern model at any position on the feedback board surface. Optimal phase and amplitude modulation, found with the simulated annealing algorithm, is employed with five actuators in a sparse array. And all actuators' vibration patterns are superimposed linearly to synthetically generate different onboard vibration energy distribution for tactile sensing. Experiments demonstrated that for point-wise vibration pattern production on our tactile board achieved an average level of about 0.9 in the Structural Similarity Index Measure (SSIM) evaluation, when compared to the ideal single-point-focused target vibration pattern. The sparse actuator array can be easily embedded into usual handheld electronic devices, which shows a good significant implication for enriching their haptic interaction functionalities.
DeformNet: Latent Space Modeling and Dynamics Prediction for Deformable Object Manipulation
Feb 12, 2024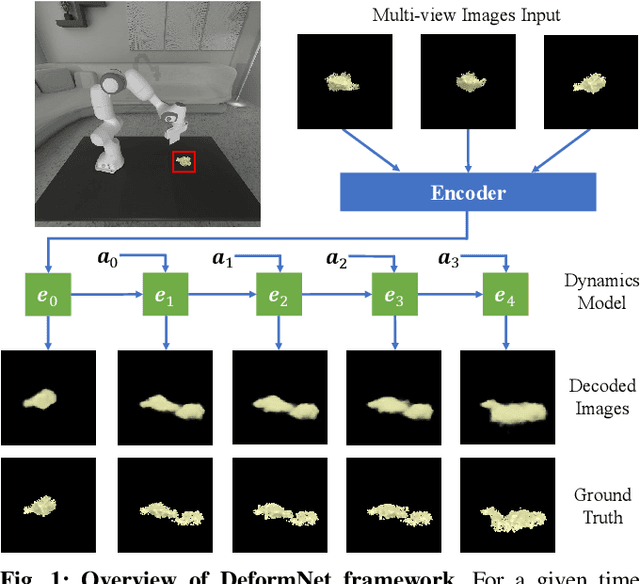
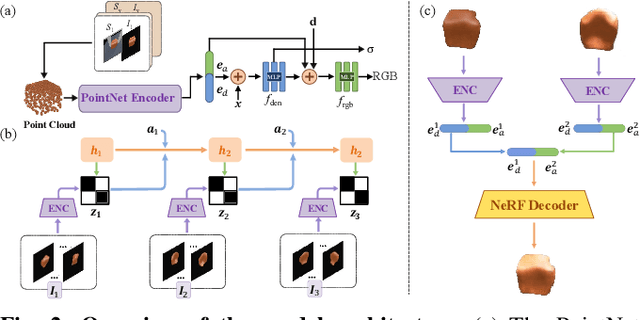
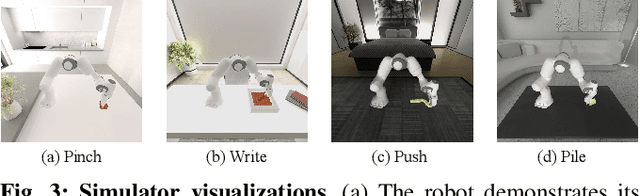
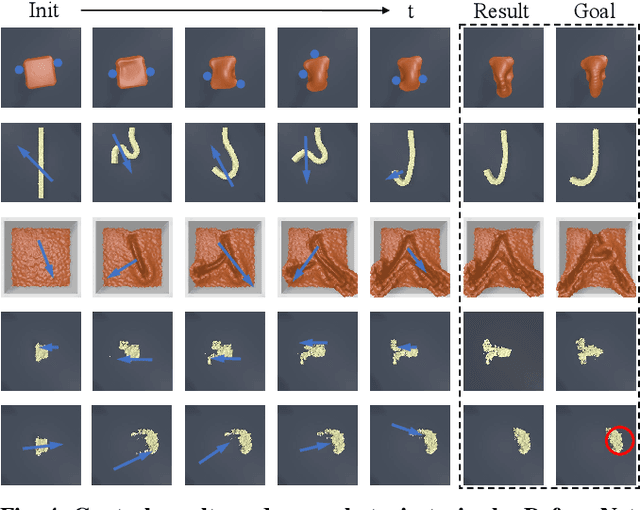
Manipulating deformable objects is a ubiquitous task in household environments, demanding adequate representation and accurate dynamics prediction due to the objects' infinite degrees of freedom. This work proposes DeformNet, which utilizes latent space modeling with a learned 3D representation model to tackle these challenges effectively. The proposed representation model combines a PointNet encoder and a conditional neural radiance field (NeRF), facilitating a thorough acquisition of object deformations and variations in lighting conditions. To model the complex dynamics, we employ a recurrent state-space model (RSSM) that accurately predicts the transformation of the latent representation over time. Extensive simulation experiments with diverse objectives demonstrate the generalization capabilities of DeformNet for various deformable object manipulation tasks, even in the presence of previously unseen goals. Finally, we deploy DeformNet on an actual UR5 robotic arm to demonstrate its capability in real-world scenarios.
Evaluation of company investment value based on machine learning
Sep 30, 2020
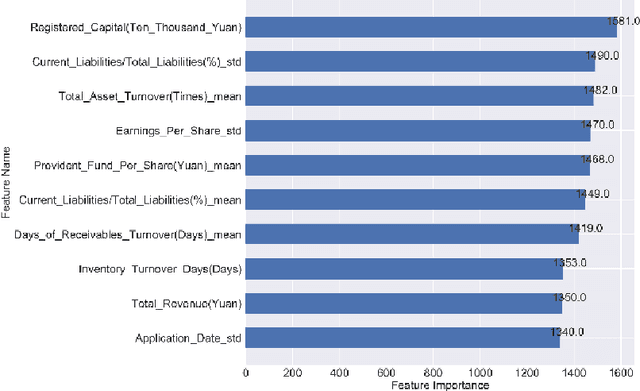
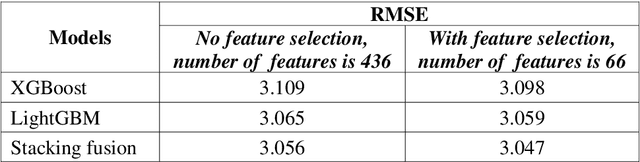
In this paper, company investment value evaluation models are established based on comprehensive company information. After data mining and extracting a set of 436 feature parameters, an optimal subset of features is obtained by dimension reduction through tree-based feature selection, followed by the 5-fold cross-validation using XGBoost and LightGBM models. The results show that the Root-Mean-Square Error (RMSE) reached 3.098 and 3.059, respectively. In order to further improve the stability and generalization capability, Bayesian Ridge Regression has been used to train a stacking model based on the XGBoost and LightGBM models. The corresponding RMSE is up to 3.047. Finally, the importance of different features to the LightGBM model is analysed.